 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Outdoor Scanning via Online Topological and Geometric Path Optimization
Paper and Code
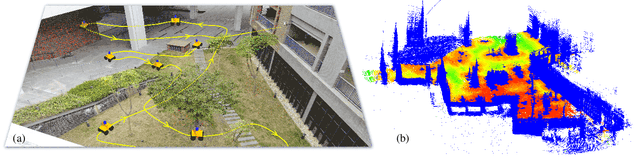
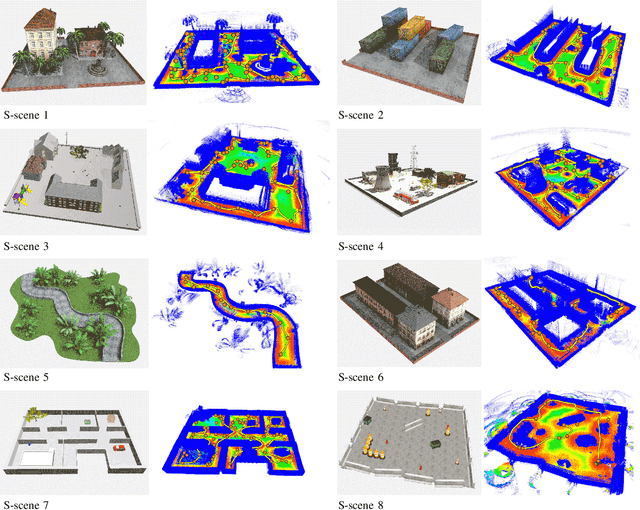
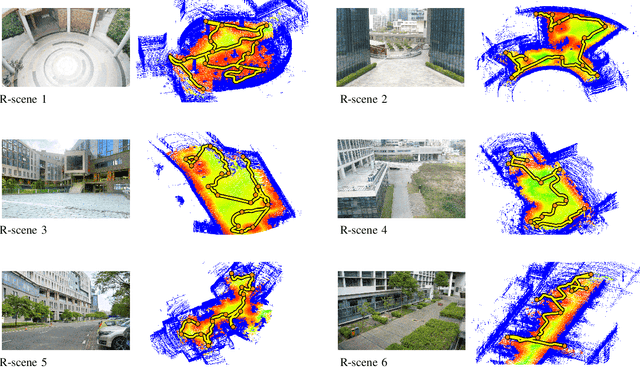
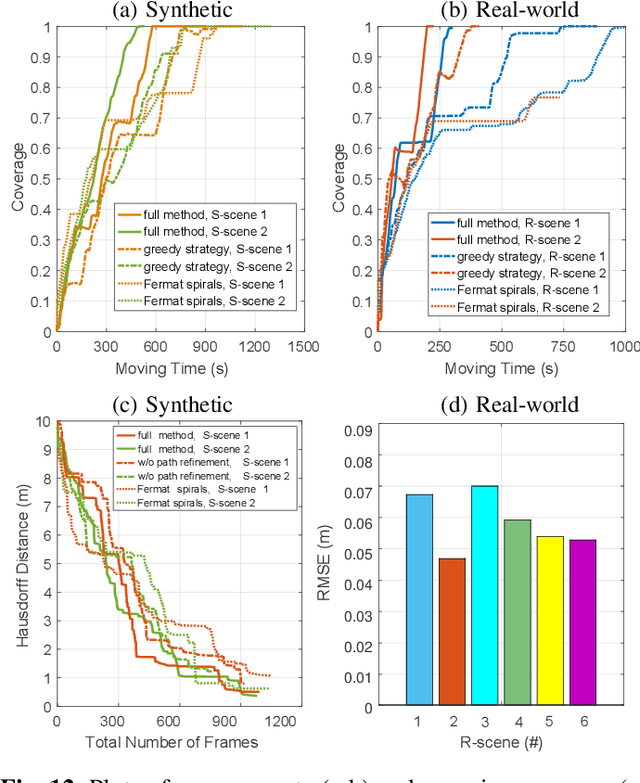
Autonomous 3D acquisition of outdoor environments poses special challenges. Different from indoor scenes, where the room space is delineated by clear boundaries and separations (e.g., walls and furniture), an outdoor environment is spacious and unbounded (thinking of a campus). Therefore, unlike for indoor scenes where the scanning effort is mainly devoted to the discovery of boundary surfaces, scanning an open and unbounded area requires actively delimiting the extent of scanning region and dynamically planning a traverse path within that region. Thus, for outdoor scenes, we formulate the planning of an energy-efficient autonomous scanning through a discrete-continuous optimization of robot scanning paths. The discrete optimization computes a topological map, through solving an online traveling sales problem (Online TSP), which determines the scanning goals and paths on-the-fly. The dynamic goals are determined as a collection of visit sites with high reward of visibility-to-unknown. A visit graph is constructed via connecting the visit sites with edges weighted by traversing cost. This topological map evolves as the robot scans via deleting outdated sites that are either visited or become rewardless and inserting newly discovered ones. The continuous part optimizes the traverse paths geometrically between two neighboring visit sites via maximizing the information gain of scanning along the paths. The discrete and continuous processes alternate until the traverse cost of the current graph exceeds the remaining energy capacity of the robot. Our approach is evaluated with both synthetic and field tests, demonstrating its effectiveness and advantages over alternatives. The project is at http://vcc.szu.edu.cn/research/2020/Husky, and the codes are available at https://github.com/alualu628628/Autonomous-Outdoor-Scanning-via-Online-Topological-and-Geometric-Path-Optimization.