 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning 2-opt Heuristics for the Traveling Salesman Problem via Deep Reinforcement Learning
Apr 03, 2020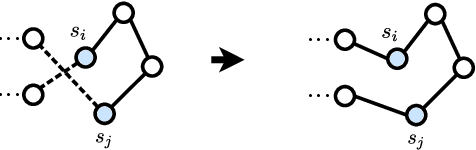

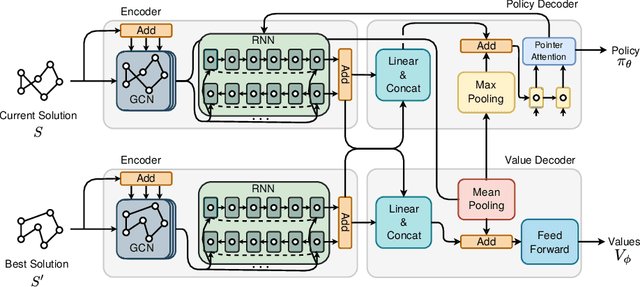

Recent works using deep learning to solve the Traveling Salesman Problem (TSP) have focused on learning construction heuristics. Such approaches find TSP solutions of good quality but require additional procedures such as beam search and sampling to improve solutions and achieve state-of-the-art performance. However, few studies have focused on improvement heuristics, where a given solution is improved until reaching a near-optimal one. In this work, we propose to learn a local search heuristic based on 2-opt operators via deep reinforcement learning. We propose a policy gradient algorithm to learn a stochastic policy that selects 2-opt operations given a current solution. Moreover, we introduce a policy neural network that leverages a pointing attention mechanism, which unlike previous works, can be easily extended to more general k-opt moves. Our results show that the learned policies can improve even over random initial solutions and approach near-optimal solutions at a faster rate than previous state-of-the-art deep learning methods.
Machine Learning based Simulation Optimisation for Trailer Management
Jul 17, 2019



In many situations, simulation models are developed to handle complex real-world business optimisation problems. For example, a discrete-event simulation model is used to simulate the trailer management process in a big Fast-Moving Consumer Goods company. To address the problem of finding suitable inputs to this simulator for optimising fleet configuration, we propose a simulation optimisation approach in this paper. The simulation optimisation model combines a metaheuristic search (genetic algorithm), with an approximation model filter (feed-forward neural network) to optimise the parameter configuration of the simulation model. We introduce an ensure probability that overrules the rejection of potential solutions by the approximation model and we demonstrate its effectiveness. In addition, we evaluate the impact of the parameters of the optimisation model on its effectiveness and show the parameters such as population size, filter threshold, and mutation probability can have a significant impact on the overall optimisation performance. Moreover, we compare the proposed method with a single global approximation model approach and a random-based approach. The results show the effectiveness of our method in terms of computation time and solution quality.
Remaining Useful Lifetime Prediction via Deep Domain Adaptation
Jul 17, 2019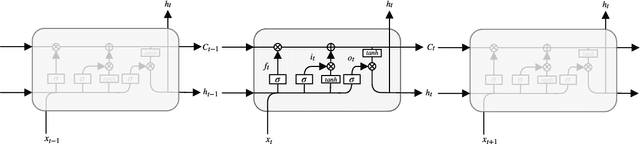
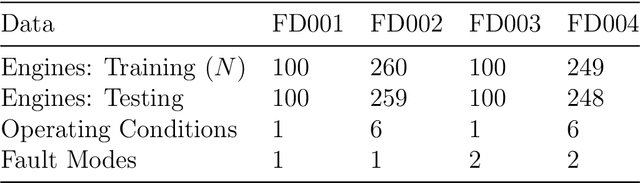
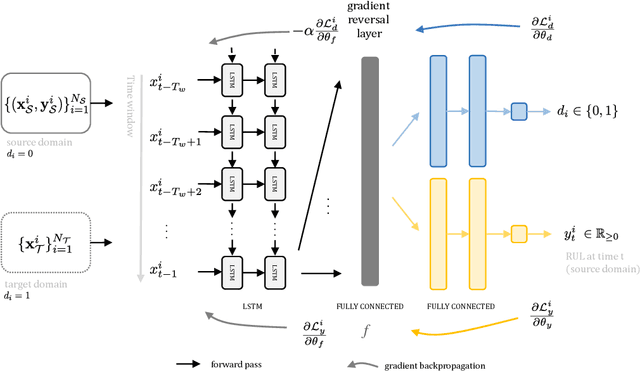
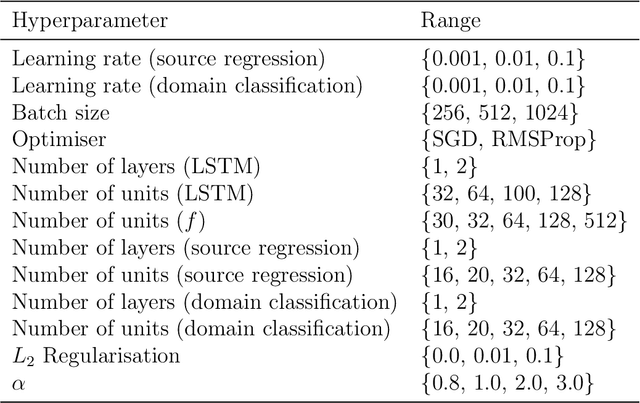
In Prognostics and Health Management (PHM) sufficient prior observed degradation data is usually critical for Remaining Useful Lifetime (RUL) prediction. Most previous data-driven prediction methods assume that training (source) and testing (target) condition monitoring data have similar distributions. However, due to different operating conditions, fault modes, noise and equipment updates distribution shift exists across different data domains. This shift reduces the performance of predictive models previously built to specific conditions when no observed run-to-failure data is available for retraining. To address this issue, this paper proposes a new data-driven approach for domain adaptation in prognostics using Long Short-Term Neural Networks (LSTM). We use a time window approach to extract temporal information from time-series data in a source domain with observed RUL values and a target domain containing only sensor information. We propose a Domain Adversarial Neural Network (DANN) approach to learn domain-invariant features that can be used to predict the RUL in the target domain. The experimental results show that the proposed method can provide more reliable RUL predictions under datasets with different operating conditions and fault modes. These results suggest that the proposed method offers a promising approach to performing domain adaptation in practical PHM applications.
Data-driven Policy on Feasibility Determination for the Train Shunting Problem
Jul 10, 2019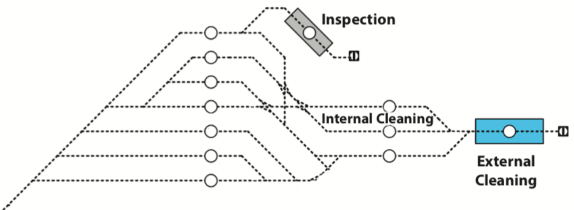

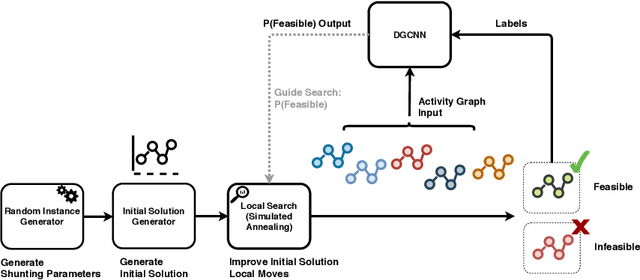

Parking, matching, scheduling, and routing are common problems in train maintenance. In particular, train units are commonly maintained and cleaned at dedicated shunting yards. The planning problem that results from such situations is referred to as the Train Unit Shunting Problem (TUSP). This problem involves matching arriving train units to service tasks and determining the schedule for departing trains. The TUSP is an important problem as it is used to determine the capacity of shunting yards and arises as a sub-problem of more general scheduling and planning problems. In this paper, we consider the case of the Dutch Railways (NS) TUSP. As the TUSP is complex, NS currently uses a local search (LS) heuristic to determine if an instance of the TUSP has a feasible solution. Given the number of shunting yards and the size of the planning problems, improving the evaluation speed of the LS brings significant computational gain. In this work, we use a machine learning approach that complements the LS and accelerates the search process. We use a Deep Graph Convolutional Neural Network (DGCNN) model to predict the feasibility of solutions obtained during the run of the LS heuristic. We use this model to decide whether to continue or abort the search process. In this way, the computation time is used more efficiently as it is spent on instances that are more likely to be feasible. Using simulations based on real-life instances of the TUSP, we show how our approach improves upon the previous method on prediction accuracy and leads to computational gains for the decision-making process.