 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrbit Determination through Cosmic Microwave Background Radiation
Apr 03, 2025
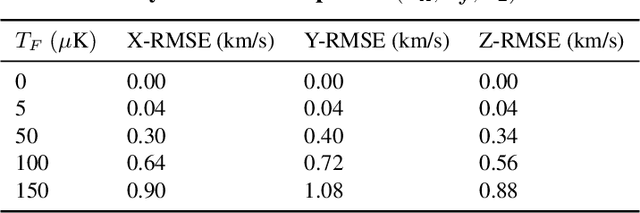


This research explores the use of Cosmic Microwave Background (CMB) radiation as a reference signal for Initial Orbit Determination (IOD). By leveraging the unique properties of CMB, this study introduces a novel method for estimating spacecraft velocity and position with minimal reliance on pre-existing environmental data, offering significant advantages for space missions independent of Earth-specific conditions. Using Machine Learning (ML) regression models, this approach demonstrates the capability to determine velocity from CMB signals and subsequently determine the satellite's position. The results indicate that CMB has the potential to enhance the autonomy and flexibility of spacecraft operations.
MAILEX: Email Event and Argument Extraction
May 22, 2023



In this work, we present the first dataset, \dataset, for performing event extraction from conversational email threads. To this end, we first proposed a new taxonomy covering 10 event types and 76 arguments in the email domain. Our final dataset includes $\sim$4K emails annotated with $\sim$9K event instances. To understand the task challenges, we conducted a series of experiments comparing two commonly-seen lines of approaches for event extraction, i.e., sequence labeling and generative end-to-end extraction (including few-shot GPT-3.5). Our results showed that the task of email event extraction is far from being addressed, due to challenges lying in, e.g., extracting non-continuous, shared trigger spans, extracting non-named entity arguments, and modeling the email conversational history. Our work thus suggests more investigations in this domain-specific event extraction task in the future.\footnote{The source code and dataset can be obtained from \url{https://github.com/salokr/Email-Event-Extraction}.
Robust human position estimation in cooperative robotic cells
Apr 17, 2023Robots are increasingly present in our lives, sharing the workspace and tasks with human co-workers. However, existing interfaces for human-robot interaction / cooperation (HRI/C) have limited levels of intuitiveness to use and safety is a major concern when humans and robots share the same workspace. Many times, this is due to the lack of a reliable estimation of the human pose in space which is the primary input to calculate the human-robot minimum distance (required for safety and collision avoidance) and HRI/C featuring machine learning algorithms classifying human behaviours / gestures. Each sensor type has its own characteristics resulting in problems such as occlusions (vision) and drift (inertial) when used in an isolated fashion. In this paper, it is proposed a combined system that merges the human tracking provided by a 3D vision sensor with the pose estimation provided by a set of inertial measurement units (IMUs) placed in human body limbs. The IMUs compensate the gaps in occluded areas to have tracking continuity. To mitigate the lingering effects of the IMU offset we propose a continuous online calculation of the offset value. Experimental tests were designed to simulate human motion in a human-robot collaborative environment where the robot moves away to avoid unexpected collisions with de human. Results indicate that our approach is able to capture the human\textsc's position, for example the forearm, with a precision in the millimetre range and robustness to occlusions.
Omnidirectional robot modeling and simulation
Nov 15, 2022



A robot simulation system is a basic need for any robotics application. With it, developers' teams of robots can test their algorithms and make initial calibrations without risk of damage to the real robots, assuring safety. However, building these simulation environments is usually time-consuming work, and when considering robot fleets, the simulation reveals to be computing expensive. With it, developers building teams of robots can test their algorithms and make initial calibrations without risk of damage to the real robots, assuring safety. An omnidirectional robot from the 5DPO robotics soccer team served to test this approach. The modeling issue was divided into two steps: modeling the motor's non-linear features and modeling the general behavior of the robot. A proper fitting of the robot was reached, considering the velocity robot's response.
* Conference proceedings ICARSC; 6 pages