 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeActive Rendezvous for Multi-Robot Pose Graph Optimization using Sensing over Wi-Fi
Jul 12, 2019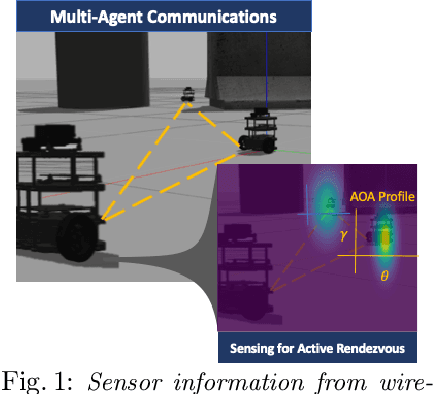
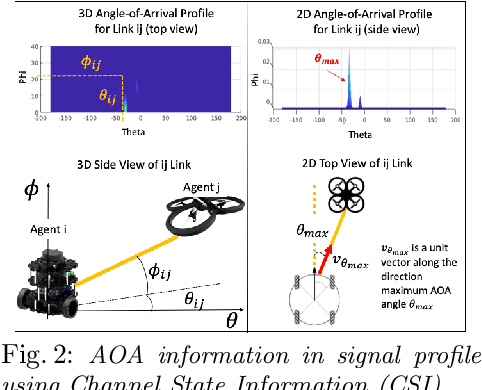
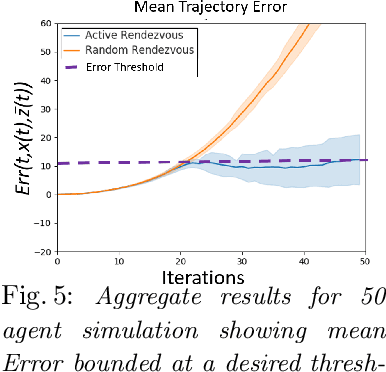
We present a novel framework for collaboration amongst a team of robots performing Pose Graph Optimization (PGO) that addresses two important challenges for multi-robot SLAM: that of enabling information exchange "on-demand" via active rendezvous, and that of rejecting outlier measurements with high probability. Our key insight is to exploit relative position data present in the communication channel between agents, as an independent measurement in PGO. We show that our algorithmic and experimental framework for integrating Channel State Information (CSI) over the communication channels, with multi-agent PGO, addresses the two open challenges of enabling information exchange and rejecting outliers. Our presented framework is distributed and applicable in low-lighting or featureless environments where traditional sensors often fail. We present extensive experimental results on actual robots showing both the use of active rendezvous resulting in error reduction by 6X as compared to randomly occurring rendezvous and the use of CSI observations providing a reduction in ground truth pose estimation errors of 32%. These results demonstrate the promise of using a combination of multi-robot coordination and CSI to address challenges in multi-agent localization and mapping -- providing an important step towards integrating communication as a novel sensor for SLAM tasks.