 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDensity-Guided Response Optimization: Community-Grounded Alignment via Implicit Acceptance Signals
Mar 03, 2026Language models deployed in online communities must adapt to norms that vary across social, cultural, and domain-specific contexts. Prior alignment approaches rely on explicit preference supervision or predefined principles, which are effective for well-resourced settings but exclude most online communities -- particularly those without institutional backing, annotation infrastructure, or organized around sensitive topics -- where preference elicitation is costly, ethically fraught, or culturally misaligned. We observe that communities already express preferences implicitly through what content they accept, engage with, and allow to persist. We show that this acceptance behavior induces measurable geometric structure in representation space: accepted responses occupy coherent, high-density regions that reflect community-specific norms, while rejected content falls in sparser or misaligned areas. We operationalize this structure as an implicit preference signal for alignment and introduce density-guided response optimization (DGRO), a method that aligns language models to community norms without requiring explicit preference labels. Using labeled preference data, we demonstrate that local density recovers pairwise community judgments, indicating that geometric structure encodes meaningful preference signal. We then apply DGRO in annotation-scarce settings across diverse communities spanning platform, topic, and language. DGRO-aligned models consistently produce responses preferred by human annotators, domain experts, and model-based judges over supervised and prompt-based baselines. We position DGRO as a practical alignment alternative for communities where explicit preference supervision is unavailable or misaligned with situated practices, and discuss the implications and risks of learning from emergent acceptance behavior.
Modeling Information Narrative Detection and Evolution on Telegram during the Russia-Ukraine War
Sep 12, 2024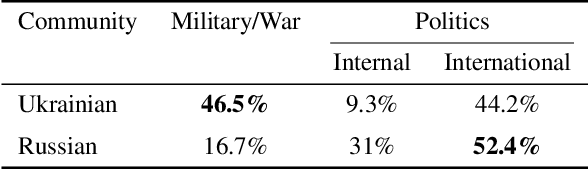
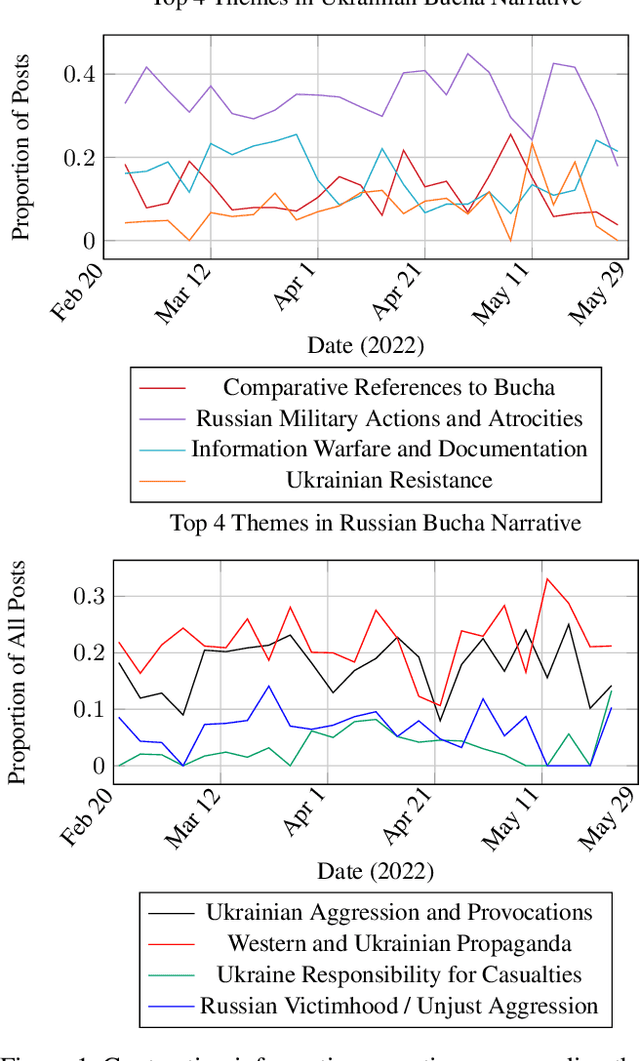
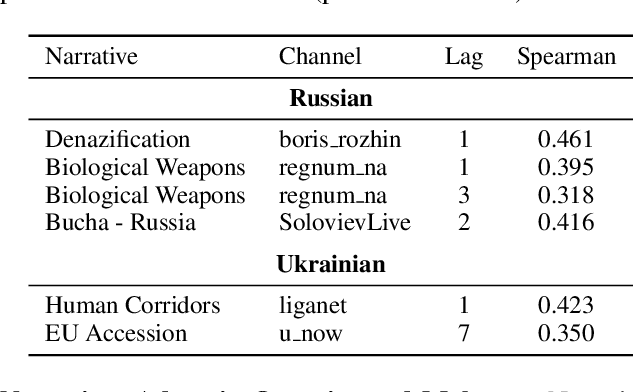
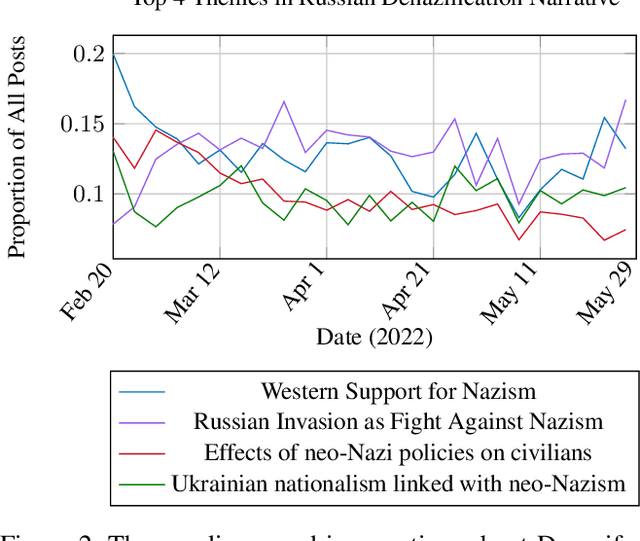
Following the Russian Federation's full-scale invasion of Ukraine in February 2022, a multitude of information narratives emerged within both pro-Russian and pro-Ukrainian communities online. As the conflict progresses, so too do the information narratives, constantly adapting and influencing local and global community perceptions and attitudes. This dynamic nature of the evolving information environment (IE) underscores a critical need to fully discern how narratives evolve and affect online communities. Existing research, however, often fails to capture information narrative evolution, overlooking both the fluid nature of narratives and the internal mechanisms that drive their evolution. Recognizing this, we introduce a novel approach designed to both model narrative evolution and uncover the underlying mechanisms driving them. In this work we perform a comparative discourse analysis across communities on Telegram covering the initial three months following the invasion. First, we uncover substantial disparities in narratives and perceptions between pro-Russian and pro-Ukrainian communities. Then, we probe deeper into prevalent narratives of each group, identifying key themes and examining the underlying mechanisms fueling their evolution. Finally, we explore influences and factors that may shape the development and spread of narratives.
How Do Pedestrians' Perception Change toward Autonomous Vehicles during Unmarked Midblock Multilane Crossings: Role of AV Operation and Signal Indication
Jan 04, 2024One of the primary impediments hindering the widespread acceptance of autonomous vehicles (AVs) among pedestrians is their limited comprehension of AVs. This study employs virtual reality (VR) to provide pedestrians with an immersive environment for engaging with and comprehending AVs during unmarked midblock multilane crossings. Diverse AV driving behaviors were modeled to exhibit negotiation behavior with a yellow signal indication or non-yielding behavior with a blue signal indication. This paper aims to investigate the impact of various factors, such as AV behavior and signaling, pedestrian past behavior, etc., on pedestrians' perception change of AVs. Before and after the VR experiment, participants completed surveys assessing their perception of AVs, focusing on two main aspects: "Attitude" and "System Effectiveness." The Wilcoxon signed-rank test results demonstrated that both pedestrians' overall attitude score toward AVs and trust in the effectiveness of AV systems significantly increased following the VR experiment. Notably, individuals who exhibited a greater trust in the yellow signals were more inclined to display a higher attitude score toward AVs and to augment their trust in the effectiveness of AV systems. This indicates that the design of the yellow signal instills pedestrians with greater confidence in their interactions with AVs. Further, pedestrians who exhibit more aggressive crossing behavior are less likely to change their perception towards AVs as compared to those pedestrians with more positive crossing behaviors. It is concluded that integrating this paper's devised AV behavior and signaling within an immersive VR setting facilitated pedestrian engagement with AVs, thereby changing their perception of AVs.
Pedestrian Behavior Interacting with Autonomous Vehicles during Unmarked Midblock Multilane Crossings: Role of Infrastructure Design, AV Operations and Signaling
Mar 30, 2023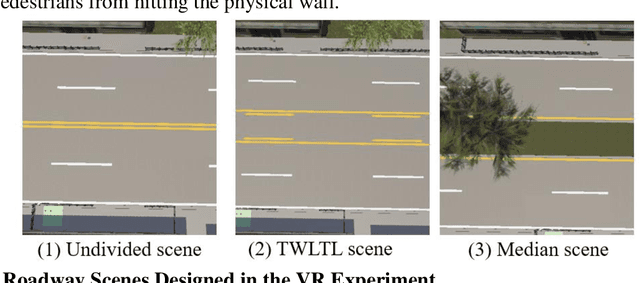
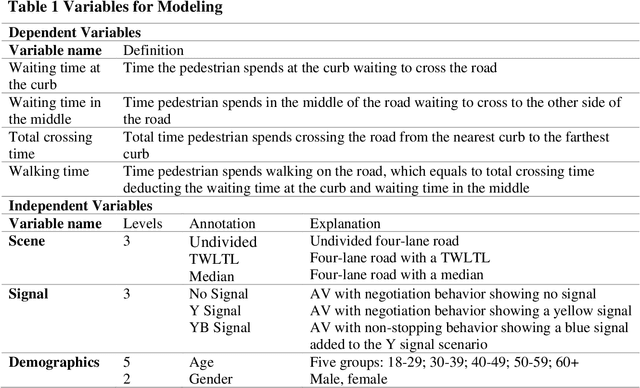
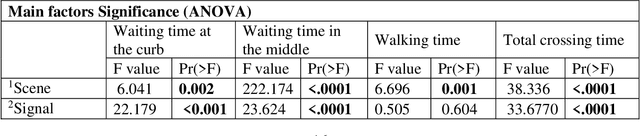
One of the main challenges autonomous vehicles (AVs) will face is interacting with pedestrians, especially at unmarked midblock locations where the right-of-way is unspecified. This study investigates pedestrian crossing behavior given different roadway centerline features (i.e., undivided, two-way left-turn lane (TWLTL), and median) and various AV operational schemes portrayed to pedestrians through on-vehicle signals (i.e., no signal, yellow negotiating indication, and yellow/blue negotiating/no-yield indications). This study employs virtual reality to simulate an urban unmarked midblock environment where pedestrians interact with AVs. Results demonstrate that both roadway centerline design features and AV operations and signaling significantly impact pedestrian unmarked midblock crossing behavior, including the waiting time at the curb, waiting time in the middle of the road, and the total crossing time. But only the roadway centerline features significantly impact the walking time. Participants in the undivided scene spent a longer time waiting at the curb and walking on the road than in the median and TWLTL scenes, but they spent a shorter time waiting in the middle. Compared to the AV without a signal, the design of yellow signal significantly reduced pedestrian waiting time at the curb and in the middle. But yellow/blue significantly increased the pedestrian waiting time. Interaction effects between roadway centerline design features and AV operations and signaling are significant only for waiting time in the middle. For middle waiting time, yellow/blue signals had the most impact on the median road type and the least on the undivided road. Demographics, past behaviors, and walking exposure are also explored. Older individuals tend to wait longer, and pedestrian past crossing behaviors and past walking exposures do not significantly impact pedestrian walking behavior.
Pedestrian Behavior Interacting with Autonomous Vehicles: Role of AV Operation and Signal Indication and Roadway Infrastructure
Mar 27, 2023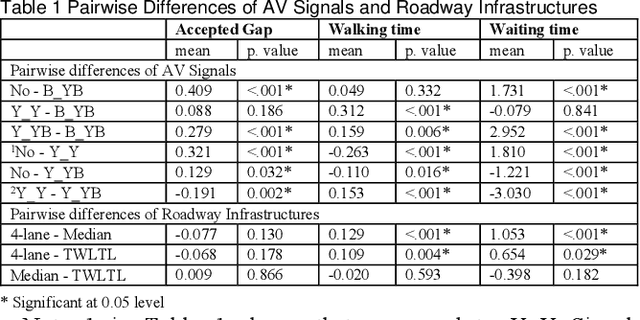
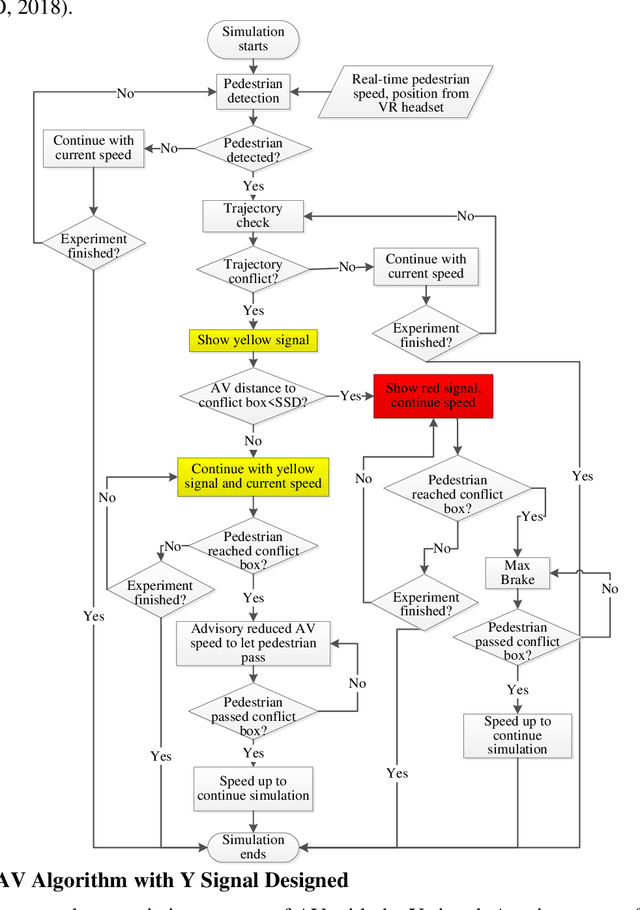
Interacting with pedestrians is challenging for Autonomous vehicles (AVs). This study evaluates how AV operations /associated signaling and roadway infrastructure affect pedestrian behavior in virtual reality. AVs were designed with different operations and signal indications, including negotiating with no signal, negotiating with a yellow signal, and yellow/blue negotiating/no-yield indications. Results show that AV signal significantly impacts pedestrians' accepted gap, walking time, and waiting time. Pedestrians chose the largest open gap between cars with AV showing no signal, and had the slowest crossing speed with AV showing a yellow signal indication. Roadway infrastructure affects pedestrian walking time and waiting time.