 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Do Pedestrians' Perception Change toward Autonomous Vehicles during Unmarked Midblock Multilane Crossings: Role of AV Operation and Signal Indication
Jan 04, 2024One of the primary impediments hindering the widespread acceptance of autonomous vehicles (AVs) among pedestrians is their limited comprehension of AVs. This study employs virtual reality (VR) to provide pedestrians with an immersive environment for engaging with and comprehending AVs during unmarked midblock multilane crossings. Diverse AV driving behaviors were modeled to exhibit negotiation behavior with a yellow signal indication or non-yielding behavior with a blue signal indication. This paper aims to investigate the impact of various factors, such as AV behavior and signaling, pedestrian past behavior, etc., on pedestrians' perception change of AVs. Before and after the VR experiment, participants completed surveys assessing their perception of AVs, focusing on two main aspects: "Attitude" and "System Effectiveness." The Wilcoxon signed-rank test results demonstrated that both pedestrians' overall attitude score toward AVs and trust in the effectiveness of AV systems significantly increased following the VR experiment. Notably, individuals who exhibited a greater trust in the yellow signals were more inclined to display a higher attitude score toward AVs and to augment their trust in the effectiveness of AV systems. This indicates that the design of the yellow signal instills pedestrians with greater confidence in their interactions with AVs. Further, pedestrians who exhibit more aggressive crossing behavior are less likely to change their perception towards AVs as compared to those pedestrians with more positive crossing behaviors. It is concluded that integrating this paper's devised AV behavior and signaling within an immersive VR setting facilitated pedestrian engagement with AVs, thereby changing their perception of AVs.
Pedestrian Behavior Interacting with Autonomous Vehicles during Unmarked Midblock Multilane Crossings: Role of Infrastructure Design, AV Operations and Signaling
Mar 30, 2023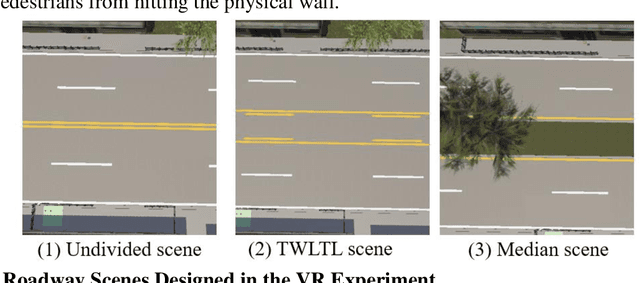
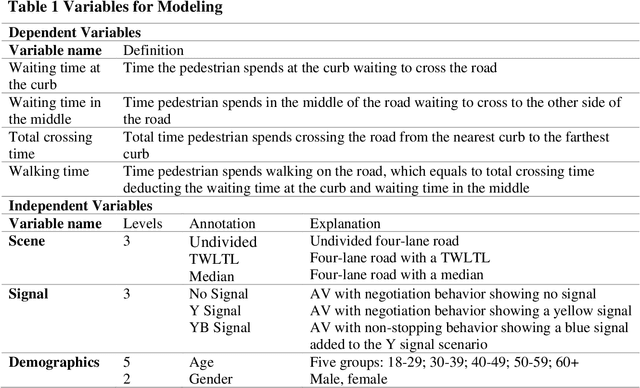
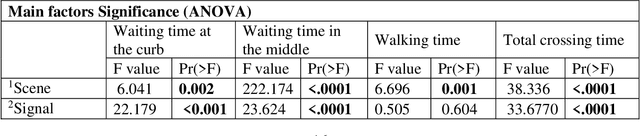
One of the main challenges autonomous vehicles (AVs) will face is interacting with pedestrians, especially at unmarked midblock locations where the right-of-way is unspecified. This study investigates pedestrian crossing behavior given different roadway centerline features (i.e., undivided, two-way left-turn lane (TWLTL), and median) and various AV operational schemes portrayed to pedestrians through on-vehicle signals (i.e., no signal, yellow negotiating indication, and yellow/blue negotiating/no-yield indications). This study employs virtual reality to simulate an urban unmarked midblock environment where pedestrians interact with AVs. Results demonstrate that both roadway centerline design features and AV operations and signaling significantly impact pedestrian unmarked midblock crossing behavior, including the waiting time at the curb, waiting time in the middle of the road, and the total crossing time. But only the roadway centerline features significantly impact the walking time. Participants in the undivided scene spent a longer time waiting at the curb and walking on the road than in the median and TWLTL scenes, but they spent a shorter time waiting in the middle. Compared to the AV without a signal, the design of yellow signal significantly reduced pedestrian waiting time at the curb and in the middle. But yellow/blue significantly increased the pedestrian waiting time. Interaction effects between roadway centerline design features and AV operations and signaling are significant only for waiting time in the middle. For middle waiting time, yellow/blue signals had the most impact on the median road type and the least on the undivided road. Demographics, past behaviors, and walking exposure are also explored. Older individuals tend to wait longer, and pedestrian past crossing behaviors and past walking exposures do not significantly impact pedestrian walking behavior.
Pedestrian Behavior Interacting with Autonomous Vehicles: Role of AV Operation and Signal Indication and Roadway Infrastructure
Mar 27, 2023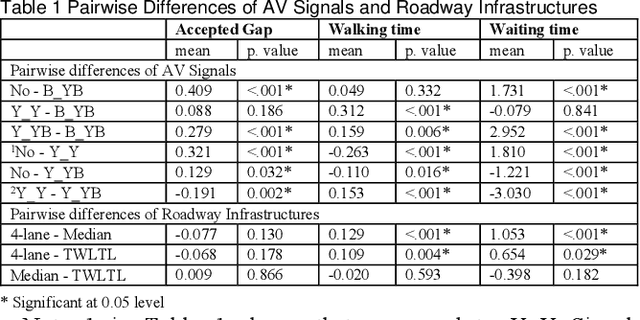
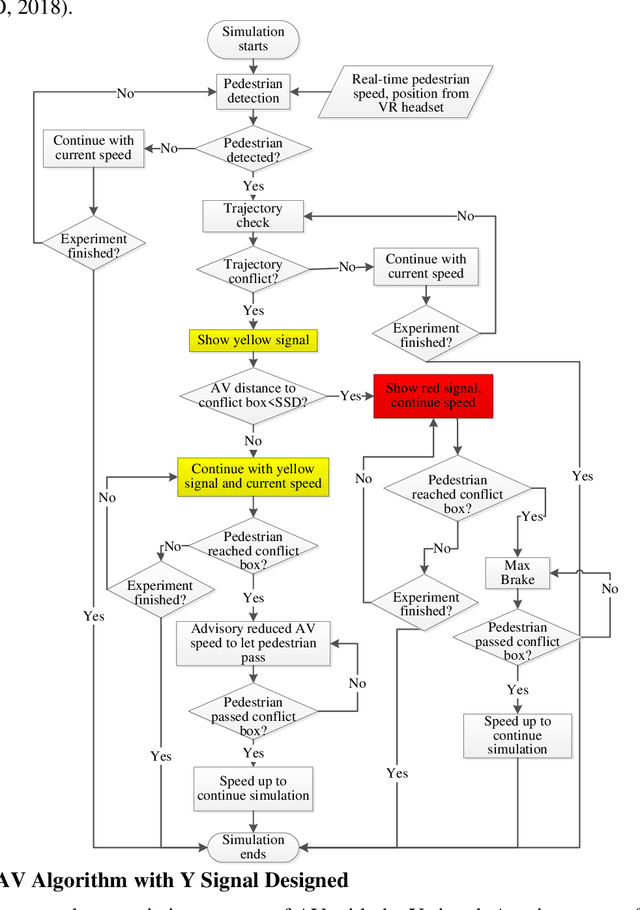
Interacting with pedestrians is challenging for Autonomous vehicles (AVs). This study evaluates how AV operations /associated signaling and roadway infrastructure affect pedestrian behavior in virtual reality. AVs were designed with different operations and signal indications, including negotiating with no signal, negotiating with a yellow signal, and yellow/blue negotiating/no-yield indications. Results show that AV signal significantly impacts pedestrians' accepted gap, walking time, and waiting time. Pedestrians chose the largest open gap between cars with AV showing no signal, and had the slowest crossing speed with AV showing a yellow signal indication. Roadway infrastructure affects pedestrian walking time and waiting time.
V2V-based Collision-avoidance Decision Strategy for Autonomous Vehicles Interacting with Fully Occluded Pedestrians at Midblock on Multilane Roadways
Mar 23, 2023Pedestrian occlusion is challenging for autonomous vehicles (AVs) at midblock locations on multilane roadways because an AV cannot detect crossing pedestrians that are fully occluded by downstream vehicles in adjacent lanes. This paper tests the capability of vehicle-to-vehicle (V2V) communication between an AV and its downstream vehicles to share midblock pedestrian crossings information. The researchers developed a V2V-based collision-avoidance decision strategy and compared it to a base scenario (i.e., decision strategy without the utilization of V2V). Simulation results showed that for the base scenario, the near-zero time-to-collision (TTC) indicated no time for the AV to take appropriate action and resulted in dramatic braking followed by collisions. But the V2V-based collision-avoidance decision strategy allowed for a proportional braking approach to increase the TTC allowing the pedestrian to cross safely. To conclude, the V2V-based collision-avoidance decision strategy has higher safety benefits for an AV interacting with fully occluded pedestrians at midblock locations on multilane roadways.