 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLUCID: Learning-Enabled Uncertainty-Aware Certification of Stochastic Dynamical Systems
Dec 12, 2025



Ensuring the safety of AI-enabled systems, particularly in high-stakes domains such as autonomous driving and healthcare, has become increasingly critical. Traditional formal verification tools fall short when faced with systems that embed both opaque, black-box AI components and complex stochastic dynamics. To address these challenges, we introduce LUCID (Learning-enabled Uncertainty-aware Certification of stochastIc Dynamical systems), a verification engine for certifying safety of black-box stochastic dynamical systems from a finite dataset of random state transitions. As such, LUCID is the first known tool capable of establishing quantified safety guarantees for such systems. Thanks to its modular architecture and extensive documentation, LUCID is designed for easy extensibility. LUCID employs a data-driven methodology rooted in control barrier certificates, which are learned directly from system transition data, to ensure formal safety guarantees. We use conditional mean embeddings to embed data into a reproducing kernel Hilbert space (RKHS), where an RKHS ambiguity set is constructed that can be inflated to robustify the result to out-of-distribution behavior. A key innovation within LUCID is its use of a finite Fourier kernel expansion to reformulate a semi-infinite non-convex optimization problem into a tractable linear program. The resulting spectral barrier allows us to leverage the fast Fourier transform to generate the relaxed problem efficiently, offering a scalable yet distributionally robust framework for verifying safety. LUCID thus offers a robust and efficient verification framework, able to handle the complexities of modern black-box systems while providing formal guarantees of safety. These unique capabilities are demonstrated on challenging benchmarks.
T-Count Optimizing Genetic Algorithm for Quantum State Preparation
Jun 06, 2024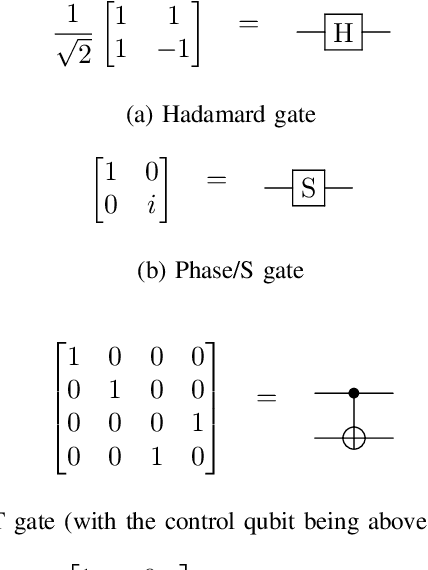
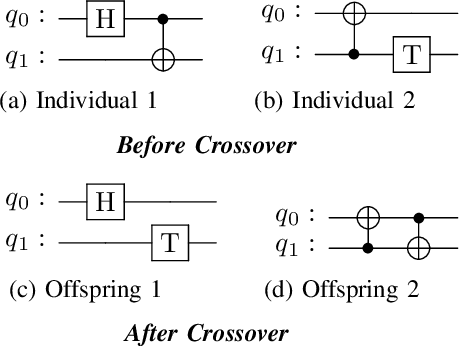

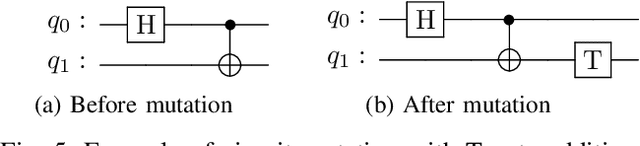
Quantum state preparation is a crucial process within numerous quantum algorithms, and the need for efficient initialization of quantum registers is ever increasing as demand for useful quantum computing grows. The problem arises as the number of qubits to be initialized grows, the circuits required to implement the desired state also exponentially increase in size leading to loss of fidelity to noise. This is mainly due to the susceptibility to environmental effects of the non-Clifford T gate, whose use should thus be reduced as much as possible. In this paper, we present and utilize a genetic algorithm for state preparation circuits consisting of gates from the Clifford + T gate set and optimize them in T-Count as to reduce the impact of noise. Whilst the method presented here does not always produce the most accurate circuits in terms of fidelity, it can generate high-fidelity, non-trivial quantum states such as quantum Fourier transform states. In addition, our algorithm does automatically generate fault tolerantly implementable solutions where the number of the most error prone components is reduced. We present an evaluation of the algorithm when trialed against preparing random, Poisson probability distribution, W, GHZ, and quantum Fourier transform states. We also experimentally demonstrate the scalability issues as qubit count increases, which highlights the need for further optimization of the search process.
Safe Reach Set Computation via Neural Barrier Certificates
Apr 29, 2024



We present a novel technique for online safety verification of autonomous systems, which performs reachability analysis efficiently for both bounded and unbounded horizons by employing neural barrier certificates. Our approach uses barrier certificates given by parameterized neural networks that depend on a given initial set, unsafe sets, and time horizon. Such networks are trained efficiently offline using system simulations sampled from regions of the state space. We then employ a meta-neural network to generalize the barrier certificates to state space regions that are outside the training set. These certificates are generated and validated online as sound over-approximations of the reachable states, thus either ensuring system safety or activating appropriate alternative actions in unsafe scenarios. We demonstrate our technique on case studies from linear models to nonlinear control-dependent models for online autonomous driving scenarios.