 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe Reach Set Computation via Neural Barrier Certificates
Apr 29, 2024We present a novel technique for online safety verification of autonomous systems, which performs reachability analysis efficiently for both bounded and unbounded horizons by employing neural barrier certificates. Our approach uses barrier certificates given by parameterized neural networks that depend on a given initial set, unsafe sets, and time horizon. Such networks are trained efficiently offline using system simulations sampled from regions of the state space. We then employ a meta-neural network to generalize the barrier certificates to state space regions that are outside the training set. These certificates are generated and validated online as sound over-approximations of the reachable states, thus either ensuring system safety or activating appropriate alternative actions in unsafe scenarios. We demonstrate our technique on case studies from linear models to nonlinear control-dependent models for online autonomous driving scenarios.
Fossil 2.0: Formal Certificate Synthesis for the Verification and Control of Dynamical Models
Nov 16, 2023This paper presents Fossil 2.0, a new major release of a software tool for the synthesis of certificates (e.g., Lyapunov and barrier functions) for dynamical systems modelled as ordinary differential and difference equations. Fossil 2.0 is much improved from its original release, including new interfaces, a significantly expanded certificate portfolio, controller synthesis and enhanced extensibility. We present these new features as part of this tool paper. Fossil implements a counterexample-guided inductive synthesis (CEGIS) loop ensuring the soundness of the method. Our tool uses neural networks as templates to generate candidate functions, which are then formally proven by an SMT solver acting as an assertion verifier. Improvements with respect to the first release include a wider range of certificates, synthesis of control laws, and support for discrete-time models.
A General Verification Framework for Dynamical and Control Models via Certificate Synthesis
Sep 12, 2023An emerging branch of control theory specialises in certificate learning, concerning the specification of a desired (possibly complex) system behaviour for an autonomous or control model, which is then analytically verified by means of a function-based proof. However, the synthesis of controllers abiding by these complex requirements is in general a non-trivial task and may elude the most expert control engineers. This results in a need for automatic techniques that are able to design controllers and to analyse a wide range of elaborate specifications. In this paper, we provide a general framework to encode system specifications and define corresponding certificates, and we present an automated approach to formally synthesise controllers and certificates. Our approach contributes to the broad field of safe learning for control, exploiting the flexibility of neural networks to provide candidate control and certificate functions, whilst using SMT-solvers to offer a formal guarantee of correctness. We test our framework by developing a prototype software tool, and assess its efficacy at verification via control and certificate synthesis over a large and varied suite of benchmarks.
On the Trade-off Between Efficiency and Precision of Neural Abstraction
Jul 28, 2023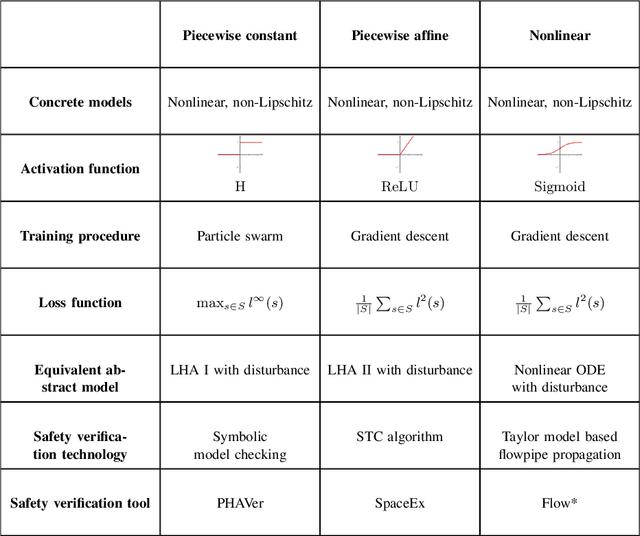
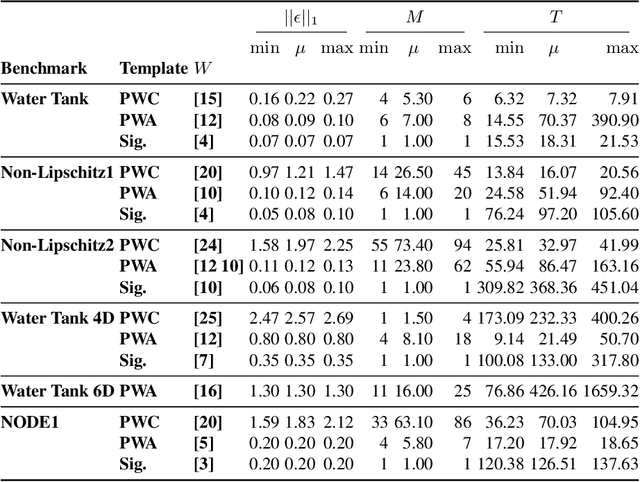
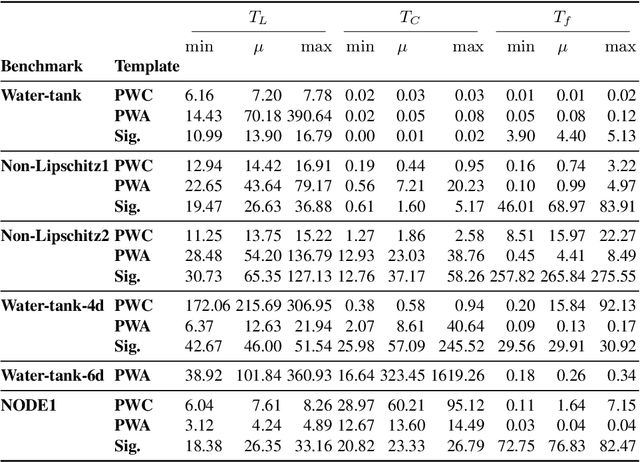
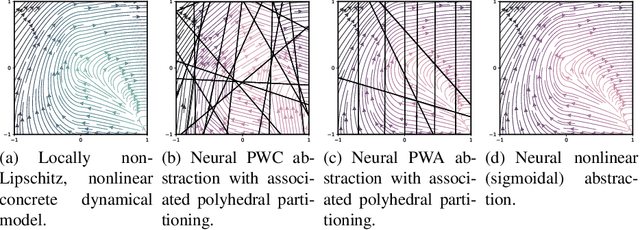
Neural abstractions have been recently introduced as formal approximations of complex, nonlinear dynamical models. They comprise a neural ODE and a certified upper bound on the error between the abstract neural network and the concrete dynamical model. So far neural abstractions have exclusively been obtained as neural networks consisting entirely of $ReLU$ activation functions, resulting in neural ODE models that have piecewise affine dynamics, and which can be equivalently interpreted as linear hybrid automata. In this work, we observe that the utility of an abstraction depends on its use: some scenarios might require coarse abstractions that are easier to analyse, whereas others might require more complex, refined abstractions. We therefore consider neural abstractions of alternative shapes, namely either piecewise constant or nonlinear non-polynomial (specifically, obtained via sigmoidal activations). We employ formal inductive synthesis procedures to generate neural abstractions that result in dynamical models with these semantics. Empirically, we demonstrate the trade-off that these different neural abstraction templates have vis-a-vis their precision and synthesis time, as well as the time required for their safety verification (done via reachability computation). We improve existing synthesis techniques to enable abstraction of higher-dimensional models, and additionally discuss the abstraction of complex neural ODEs to improve the efficiency of reachability analysis for these models.
Neural Abstractions
Jan 27, 2023We present a novel method for the safety verification of nonlinear dynamical models that uses neural networks to represent abstractions of their dynamics. Neural networks have extensively been used before as approximators; in this work, we make a step further and use them for the first time as abstractions. For a given dynamical model, our method synthesises a neural network that overapproximates its dynamics by ensuring an arbitrarily tight, formally certified bound on the approximation error. For this purpose, we employ a counterexample-guided inductive synthesis procedure. We show that this produces a neural ODE with non-deterministic disturbances that constitutes a formal abstraction of the concrete model under analysis. This guarantees a fundamental property: if the abstract model is safe, i.e., free from any initialised trajectory that reaches an undesirable state, then the concrete model is also safe. By using neural ODEs with ReLU activation functions as abstractions, we cast the safety verification problem for nonlinear dynamical models into that of hybrid automata with affine dynamics, which we verify using SpaceEx. We demonstrate that our approach performs comparably to the mature tool Flow* on existing benchmark nonlinear models. We additionally demonstrate and that it is effective on models that do not exhibit local Lipschitz continuity, which are out of reach to the existing technologies.