 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime out of Mind: Generating Rate of Speech conditioned on emotion and speaker
Jan 31, 2023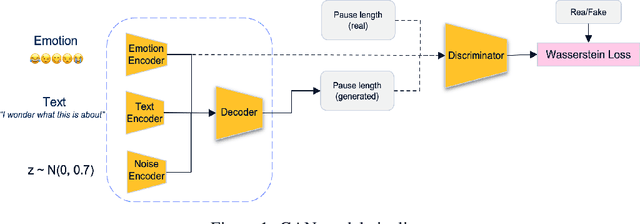
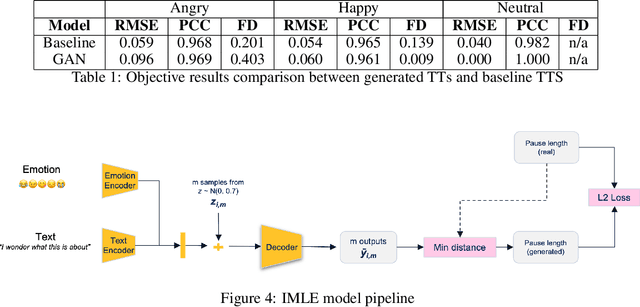
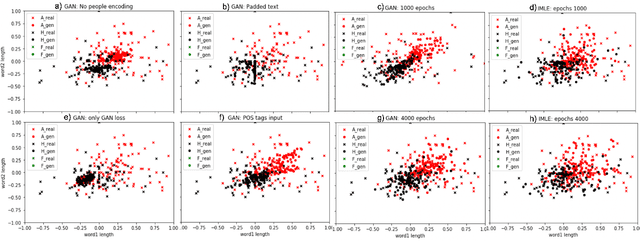
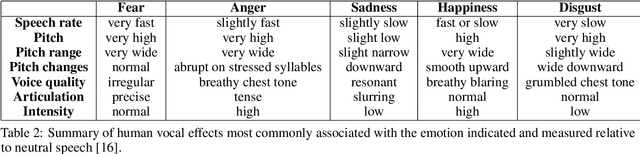
Voice synthesis has seen significant improvements in the past decade resulting in highly intelligible voices. Further investigations have resulted in models that can produce variable speech, including conditional emotional expression. The problem lies, however, in a focus on phrase-level modifications and prosodic vocal features. Using the CREMA-D dataset we have trained a GAN conditioned on emotion to generate worth lengths for a given input text. These word lengths are relative to neutral speech and can be provided, through speech synthesis markup language (SSML) to a text-to-speech (TTS) system to generate more expressive speech. Additionally, a generative model is also trained using implicit maximum likelihood estimation (IMLE) and a comparative analysis with GANs is included. We were able to achieve better performances on objective measures for neutral speech, and better time alignment for happy speech when compared to an out-of-box model. However, further investigation of subjective evaluation is required.
Read the Room: Adapting a Robot's Voice to Ambient and Social Contexts
May 10, 2022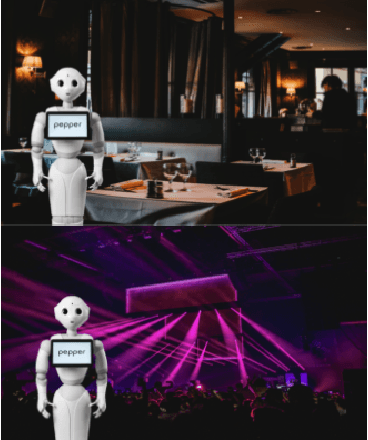
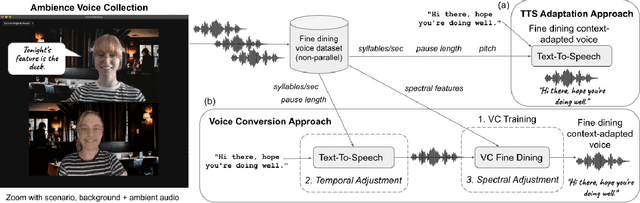
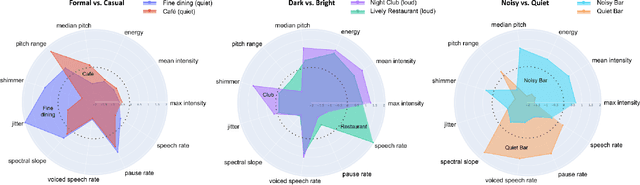

Adapting one's voice to different ambient environments and social interactions is required for human social interaction. In robotics, the ability to recognize speech in noisy and quiet environments has received significant attention, but considering ambient cues in the production of social speech features has been little explored. Our research aims to modify a robot's speech to maximize acceptability in various social and acoustic contexts, starting with a use case for service robots in varying restaurants. We created an original dataset collected over Zoom with participants conversing in scripted and unscripted tasks given 7 different ambient sounds and background images. Voice conversion methods, in addition to altered Text-to-Speech that matched ambient specific data, were used for speech synthesis tasks. We conducted a subjective perception study that showed humans prefer synthetic speech that matches ambience and social context, ultimately preferring more human-like voices. This work provides three solutions to ambient and socially appropriate synthetic voices: (1) a novel protocol to collect real contextual audio voice data, (2) tools and directions to manipulate robot speech for appropriate social and ambient specific interactions, and (3) insight into voice conversion's role in flexibly altering robot speech to match different ambient environments.