 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointNetPGAP-SLC: A 3D LiDAR-based Place Recognition Approach with Segment-level Consistency Training for Mobile Robots in Horticulture
May 29, 2024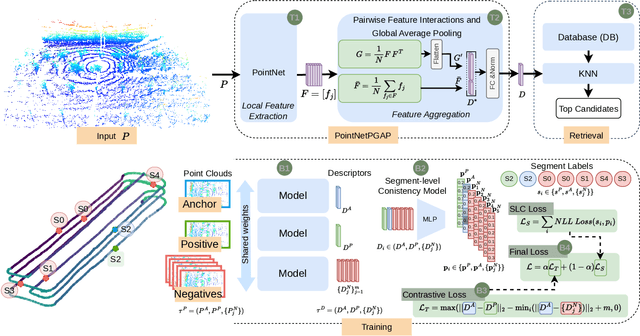
This paper addresses robotic place recognition in horticultural environments using 3D-LiDAR technology and deep learning. Three main contributions are proposed: (i) a novel model called PointNetPGAP, which combines a global average pooling aggregator and a pairwise feature interaction aggregator; (ii) a Segment-Level Consistency (SLC) model, used only during training, with the goal of augmenting the contrastive loss with a context-specific training signal to enhance descriptors; and (iii) a novel dataset named HORTO-3DLM featuring sequences from orchards and strawberry plantations. The experimental evaluation, conducted on the new HORTO-3DLM dataset, compares PointNetPGAP at the sequence- and segment-level with state-of-the-art (SOTA) models, including OverlapTransformer, PointNetVLAD, and LOGG3D. Additionally, all models were trained and evaluated using the SLC. Empirical results obtained through a cross-validation evaluation protocol demonstrate the superiority of PointNetPGAP compared to existing SOTA models. PointNetPGAP emerges as the best model in retrieving the top-1 candidate, outperforming PointNetVLAD (the second-best model). Moreover, when comparing the impact of training with the SLC model, performance increased on four out of the five evaluated models, indicating that adding a context-specific signal to the contrastive loss leads to improved descriptors.
ORCHNet: A Robust Global Feature Aggregation approach for 3D LiDAR-based Place recognition in Orchards
Mar 01, 2023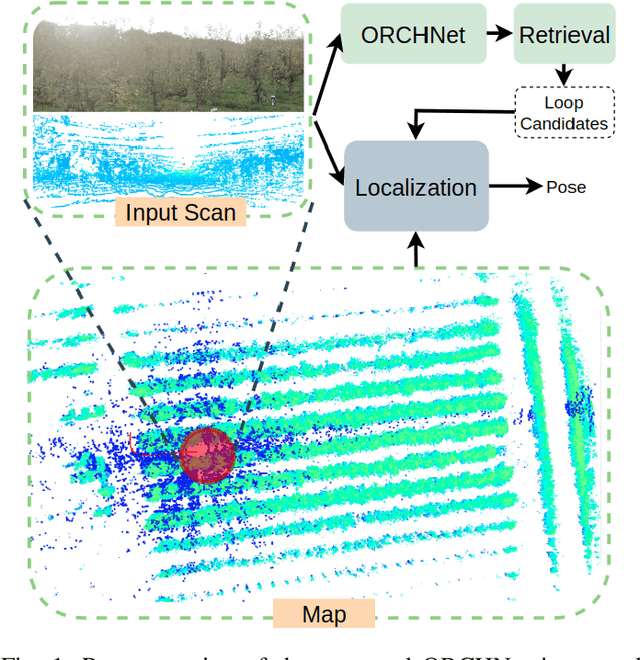
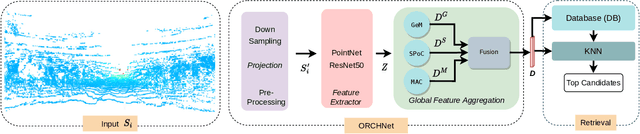
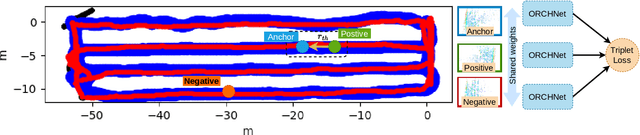
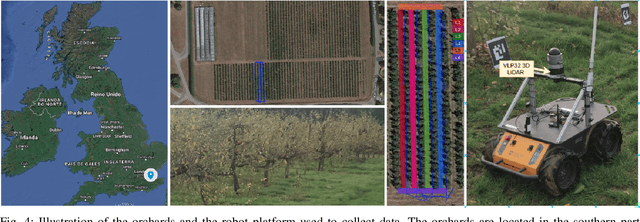
Robust and reliable place recognition and loop closure detection in agricultural environments is still an open problem. In particular, orchards are a difficult case study due to structural similarity across the entire field. In this work, we address the place recognition problem in orchards resorting to 3D LiDAR data, which is considered a key modality for robustness. Hence, we propose ORCHNet, a deep-learning-based approach that maps 3D-LiDAR scans to global descriptors. Specifically, this work proposes a new global feature aggregation approach, which fuses multiple aggregation methods into a robust global descriptor. ORCHNet is evaluated on real-world data collected in orchards, comprising data from the summer and autumn seasons. To assess the robustness, We compare ORCHNet with state-of-the-art aggregation approaches on data from the same season and across seasons. Moreover, we additionally evaluate the proposed approach as part of a localization framework, where ORCHNet is used as a loop closure detector. The empirical results indicate that, on the place recognition task, ORCHNet outperforms the remaining approaches, and is also more robust across seasons. As for the localization, the edge cases where the path goes through the trees are solved when integrating ORCHNet as a loop detector, showing the potential applicability of the proposed approach in this task. The code and dataset will be publicly available at:\url{https://github.com/Cybonic/ORCHNet.git}
Multispectral Vineyard Segmentation: A Deep Learning approach
Aug 05, 2021



Digital agriculture has evolved significantly over the last few years due to the technological developments in automation and computational intelligence applied to the agricultural sector, including vineyards which are a relevant crop in the Mediterranean region. In this paper, a study of semantic segmentation for vine detection in real-world vineyards is presented by exploring state-of-the-art deep segmentation networks and conventional unsupervised methods. Camera data was collected on vineyards using an Unmanned Aerial System (UAS) equipped with a dual imaging sensor payload, namely a high-resolution color camera and a five-band multispectral and thermal camera. Extensive experiments of the segmentation networks and unsupervised methods have been performed on multimodal datasets representing three distinct vineyards located in the central region of Portugal. The reported results indicate that the best segmentation performances are obtained with deep networks, while traditional (non-deep) approaches using the NIR band shown competitive results. The results also show that multimodality slightly improves the performance of vine segmentation but the NIR spectrum alone generally is sufficient on most of the datasets. The code and dataset are publicly available on https://github.com/Cybonic/DL_vineyard_segmentation_study.git