 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointNetPGAP-SLC: A 3D LiDAR-based Place Recognition Approach with Segment-level Consistency Training for Mobile Robots in Horticulture
Paper and Code
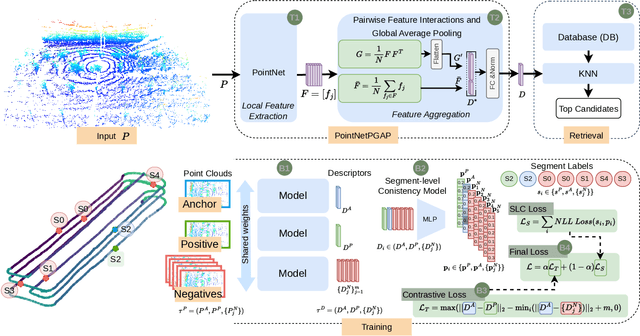
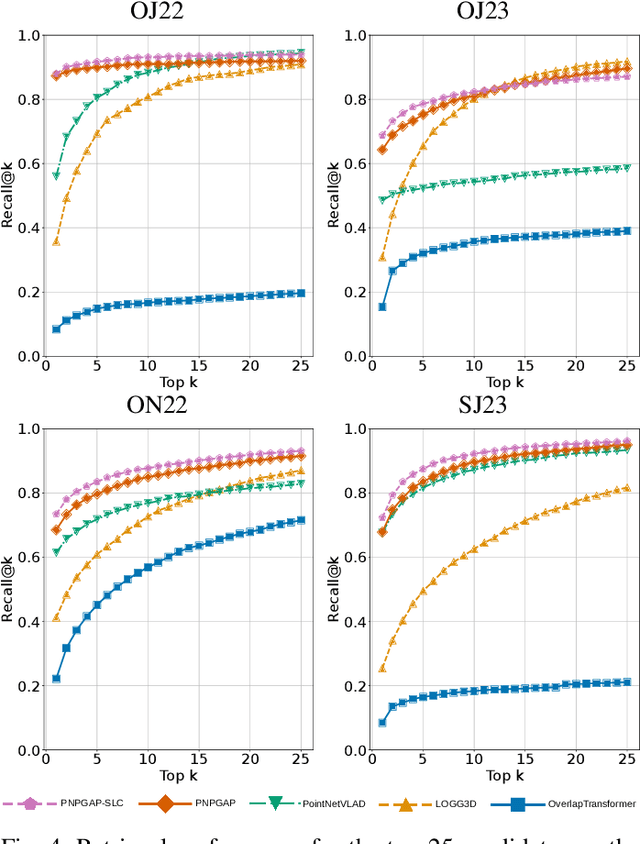
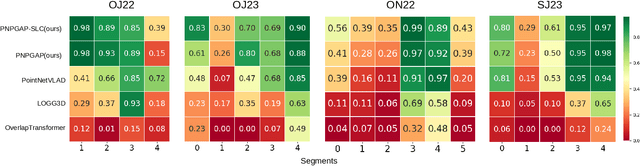
This paper addresses robotic place recognition in horticultural environments using 3D-LiDAR technology and deep learning. Three main contributions are proposed: (i) a novel model called PointNetPGAP, which combines a global average pooling aggregator and a pairwise feature interaction aggregator; (ii) a Segment-Level Consistency (SLC) model, used only during training, with the goal of augmenting the contrastive loss with a context-specific training signal to enhance descriptors; and (iii) a novel dataset named HORTO-3DLM featuring sequences from orchards and strawberry plantations. The experimental evaluation, conducted on the new HORTO-3DLM dataset, compares PointNetPGAP at the sequence- and segment-level with state-of-the-art (SOTA) models, including OverlapTransformer, PointNetVLAD, and LOGG3D. Additionally, all models were trained and evaluated using the SLC. Empirical results obtained through a cross-validation evaluation protocol demonstrate the superiority of PointNetPGAP compared to existing SOTA models. PointNetPGAP emerges as the best model in retrieving the top-1 candidate, outperforming PointNetVLAD (the second-best model). Moreover, when comparing the impact of training with the SLC model, performance increased on four out of the five evaluated models, indicating that adding a context-specific signal to the contrastive loss leads to improved descriptors.