 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Primer on the Differential Calculus of 3D Orientations
Oct 31, 2016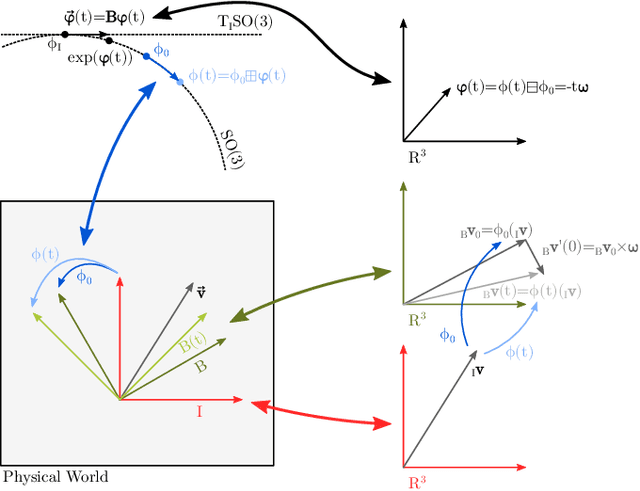
The proper handling of 3D orientations is a central element in many optimization problems in engineering. Unfortunately many researchers and engineers struggle with the formulation of such problems and often fall back to suboptimal solutions. The existence of many different conventions further complicates this issue, especially when interfacing multiple differing implementations. This document discusses an alternative approach which makes use of a more abstract notion of 3D orientations. The relative orientation between two coordinate systems is primarily identified by the coordinate mapping it induces. This is combined with the standard exponential map in order to introduce representation-independent and minimal differentials, which are very convenient in optimization based methods.