 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGANmouflage: 3D Object Nondetection with Texture Fields
Jan 18, 2022



We propose a method that learns to camouflage 3D objects within scenes. Given an object's shape and a distribution of viewpoints from which it will be seen, we estimate a texture that will make it difficult to detect. Successfully solving this task requires a model that can accurately reproduce textures from the scene, while simultaneously dealing with the highly conflicting constraints imposed by each viewpoint. We address these challenges with a model based on texture fields and adversarial learning. Our model learns to camouflage a variety of object shapes from randomly sampled locations and viewpoints within the input scene, and is the first to address the problem of hiding complex object shapes. Using a human visual search study, we find that our estimated textures conceal objects significantly better than previous methods. Project site: https://rrrrrguo.github.io/ganmouflage/
Deepfake Detection using Spatiotemporal Convolutional Networks
Jun 26, 2020
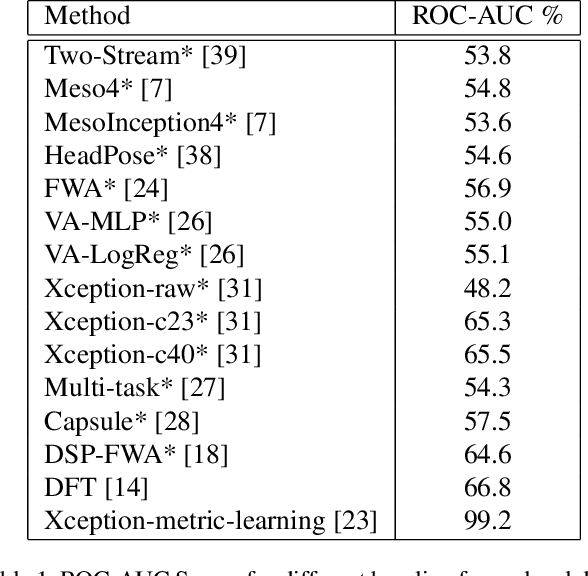
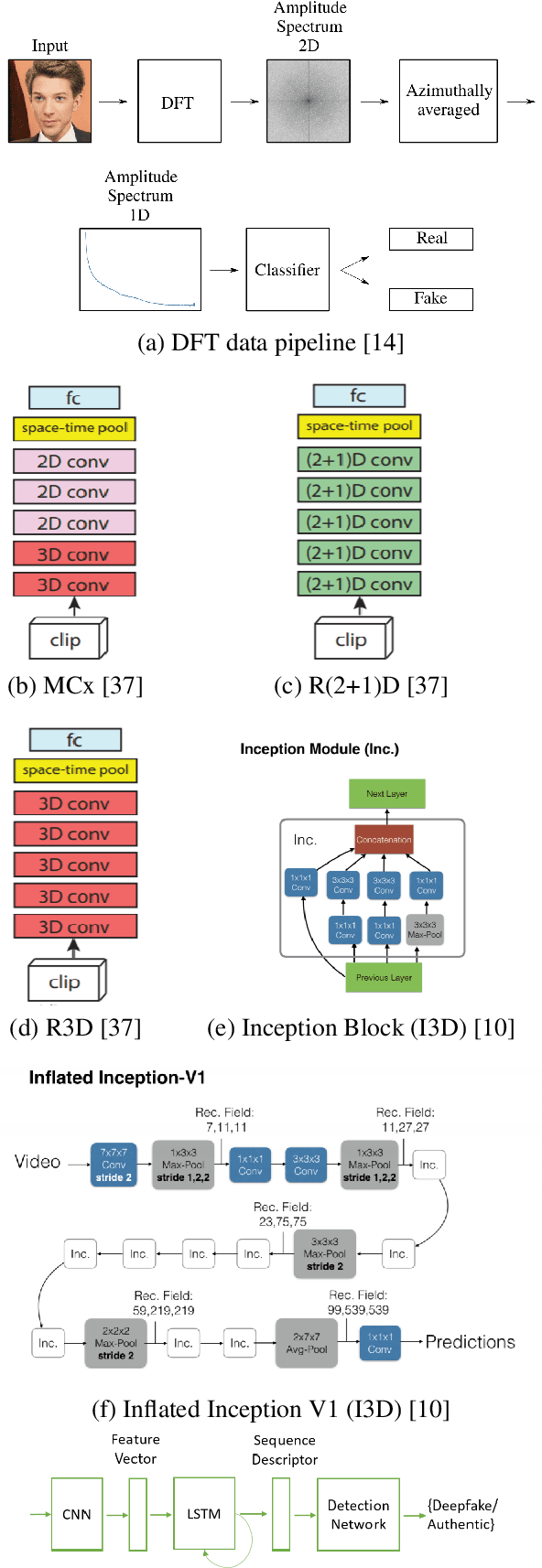
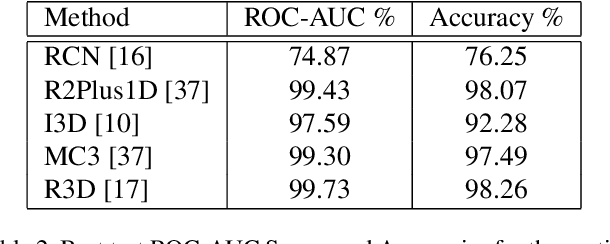
Better generative models and larger datasets have led to more realistic fake videos that can fool the human eye but produce temporal and spatial artifacts that deep learning approaches can detect. Most current Deepfake detection methods only use individual video frames and therefore fail to learn from temporal information. We created a benchmark of the performance of spatiotemporal convolutional methods using the Celeb-DF dataset. Our methods outperformed state-of-the-art frame-based detection methods. Code for our paper is publicly available at https://github.com/oidelima/Deepfake-Detection.
Efficient Ridesharing Dispatch Using Multi-Agent Reinforcement Learning
Jun 18, 2020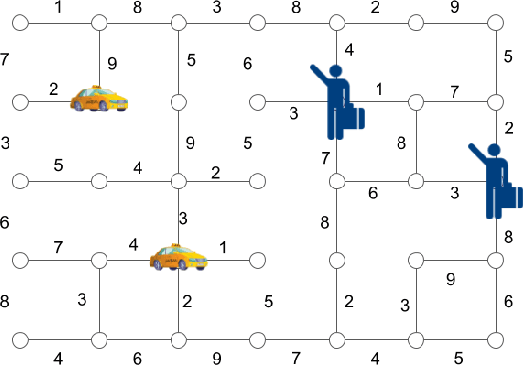
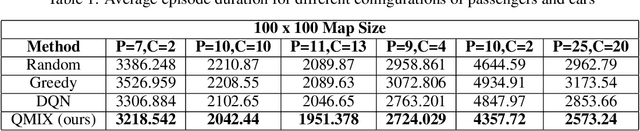
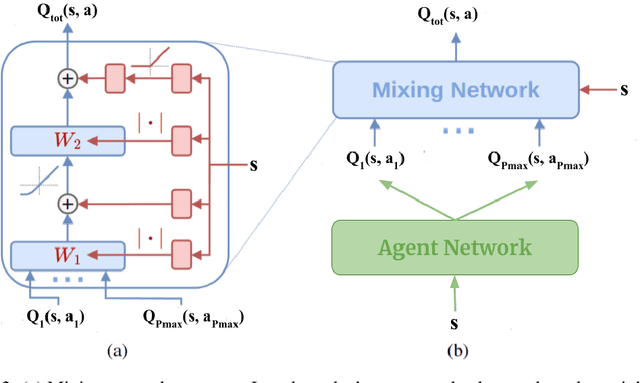
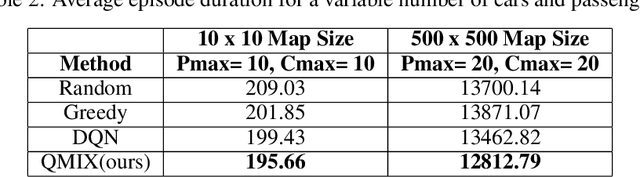
With the advent of ride-sharing services, there is a huge increase in the number of people who rely on them for various needs. Most of the earlier approaches tackling this issue required handcrafted functions for estimating travel times and passenger waiting times. Traditional Reinforcement Learning (RL) based methods attempting to solve the ridesharing problem are unable to accurately model the complex environment in which taxis operate. Prior Multi-Agent Deep RL based methods based on Independent DQN (IDQN) learn decentralized value functions prone to instability due to the concurrent learning and exploring of multiple agents. Our proposed method based on QMIX is able to achieve centralized training with decentralized execution. We show that our model performs better than the IDQN baseline on a fixed grid size and is able to generalize well to smaller or larger grid sizes. Also, our algorithm is able to outperform IDQN baseline in the scenario where we have a variable number of passengers and cars in each episode. Code for our paper is publicly available at: https://github.com/UMich-ML-Group/RL-Ridesharing.