 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvidence on the Regularisation Properties of Maximum-Entropy Reinforcement Learning
Jan 28, 2025The generalisation and robustness properties of policies learnt through Maximum-Entropy Reinforcement Learning are investigated on chaotic dynamical systems with Gaussian noise on the observable. First, the robustness under noise contamination of the agent's observation of entropy regularised policies is observed. Second, notions of statistical learning theory, such as complexity measures on the learnt model, are borrowed to explain and predict the phenomenon. Results show the existence of a relationship between entropy-regularised policy optimisation and robustness to noise, which can be described by the chosen complexity measures.
Increasing Information for Model Predictive Control with Semi-Markov Decision Processes
Jan 28, 2025Recent works in Learning-Based Model Predictive Control of dynamical systems show impressive sample complexity performances using criteria from Information Theory to accelerate the learning procedure. However, the sequential exploration opportunities are limited by the system local state, restraining the amount of information of the observations from the current exploration trajectory. This article resolves this limitation by introducing temporal abstraction through the framework of Semi-Markov Decision Processes. The framework increases the total information of the gathered data for a fixed sampling budget, thus reducing the sample complexity.
Neural DDEs with Learnable Delays for Partially Observed Dynamical Systems
Oct 03, 2024Many successful methods to learn dynamical systems from data have recently been introduced. Such methods often rely on the availability of the system's full state. However, this underlying hypothesis is rather restrictive as it is typically not confirmed in practice, leaving us with partially observed systems. Utilizing the Mori-Zwanzig (MZ) formalism from statistical physics, we demonstrate that Constant Lag Neural Delay Differential Equations (NDDEs) naturally serve as suitable models for partially observed states. In empirical evaluation, we show that such models outperform existing methods on both synthetic and experimental data.
Enhancing Data-Assimilation in CFD using Graph Neural Networks
Nov 29, 2023We present a novel machine learning approach for data assimilation applied in fluid mechanics, based on adjoint-optimization augmented by Graph Neural Networks (GNNs) models. We consider as baseline the Reynolds-Averaged Navier-Stokes (RANS) equations, where the unknown is the meanflow and a closure model based on the Reynolds-stress tensor is required for correctly computing the solution. An end-to-end process is cast; first, we train a GNN model for the closure term. Second, the GNN model is introduced in the training process of data assimilation, where the RANS equations act as a physics constraint for a consistent prediction. We obtain our results using direct numerical simulations based on a Finite Element Method (FEM) solver; a two-fold interface between the GNN model and the solver allows the GNN's predictions to be incorporated into post-processing steps of the FEM analysis. The proposed scheme provides an excellent reconstruction of the meanflow without any features selection; preliminary results show promising generalization properties over unseen flow configurations.
Neural State-Dependent Delay Differential Equations
Jun 26, 2023


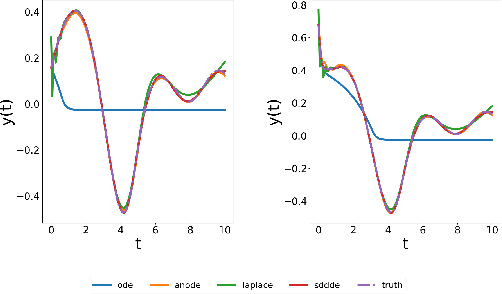
Discontinuities and delayed terms are encountered in the governing equations of a large class of problems ranging from physics, engineering, medicine to economics. These systems are impossible to be properly modelled and simulated with standard Ordinary Differential Equations (ODE), or any data-driven approximation including Neural Ordinary Differential Equations (NODE). To circumvent this issue, latent variables are typically introduced to solve the dynamics of the system in a higher dimensional space and obtain the solution as a projection to the original space. However, this solution lacks physical interpretability. In contrast, Delay Differential Equations (DDEs) and their data-driven, approximated counterparts naturally appear as good candidates to characterize such complicated systems. In this work we revisit the recently proposed Neural DDE by introducing Neural State-Dependent DDE (SDDDE), a general and flexible framework featuring multiple and state-dependent delays. The developed framework is auto-differentiable and runs efficiently on multiple backends. We show that our method is competitive and outperforms other continuous-class models on a wide variety of delayed dynamical systems.
Leveraging the structure of dynamical systems for data-driven modeling
Dec 15, 2021
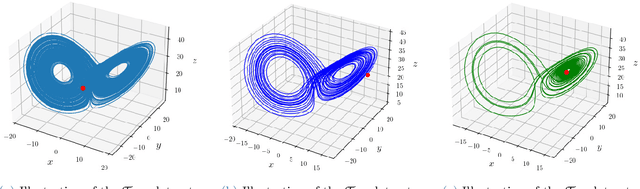

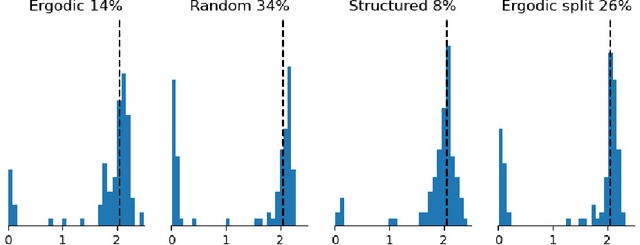
The reliable prediction of the temporal behavior of complex systems is required in numerous scientific fields. This strong interest is however hindered by modeling issues: often, the governing equations describing the physics of the system under consideration are not accessible or, when known, their solution might require a computational time incompatible with the prediction time constraints. Nowadays, approximating complex systems at hand in a generic functional format and informing it ex nihilo from available observations has become a common practice, as illustrated by the enormous amount of scientific work appeared in the last years. Numerous successful examples based on deep neural networks are already available, although generalizability of the models and margins of guarantee are often overlooked. Here, we consider Long-Short Term Memory neural networks and thoroughly investigate the impact of the training set and its structure on the quality of the long-term prediction. Leveraging ergodic theory, we analyze the amount of data sufficient for a priori guaranteeing a faithful model of the physical system. We show how an informed design of the training set, based on invariants of the system and the structure of the underlying attractor, significantly improves the resulting models, opening up avenues for research within the context of active learning. Further, the non-trivial effects of the memory initializations when relying on memory-capable models will be illustrated. Our findings provide evidence-based good-practice on the amount and the choice of data required for an effective data-driven modeling of any complex dynamical system.