 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLeveraging the structure of dynamical systems for data-driven modeling
Paper and Code
Dec 15, 2021
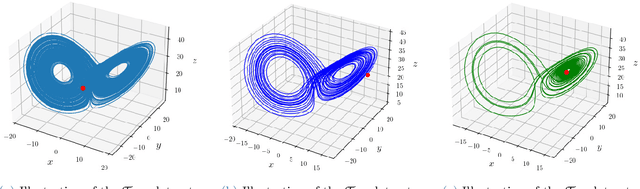

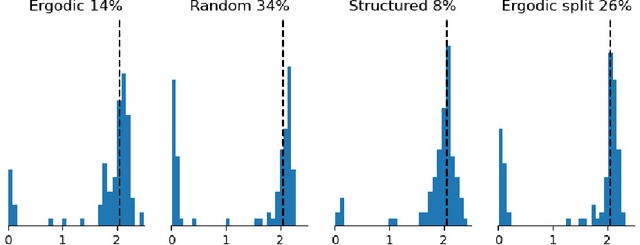
The reliable prediction of the temporal behavior of complex systems is required in numerous scientific fields. This strong interest is however hindered by modeling issues: often, the governing equations describing the physics of the system under consideration are not accessible or, when known, their solution might require a computational time incompatible with the prediction time constraints. Nowadays, approximating complex systems at hand in a generic functional format and informing it ex nihilo from available observations has become a common practice, as illustrated by the enormous amount of scientific work appeared in the last years. Numerous successful examples based on deep neural networks are already available, although generalizability of the models and margins of guarantee are often overlooked. Here, we consider Long-Short Term Memory neural networks and thoroughly investigate the impact of the training set and its structure on the quality of the long-term prediction. Leveraging ergodic theory, we analyze the amount of data sufficient for a priori guaranteeing a faithful model of the physical system. We show how an informed design of the training set, based on invariants of the system and the structure of the underlying attractor, significantly improves the resulting models, opening up avenues for research within the context of active learning. Further, the non-trivial effects of the memory initializations when relying on memory-capable models will be illustrated. Our findings provide evidence-based good-practice on the amount and the choice of data required for an effective data-driven modeling of any complex dynamical system.