 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint Learning Architecture for Multiple Object Tracking and Trajectory Forecasting
Aug 24, 2021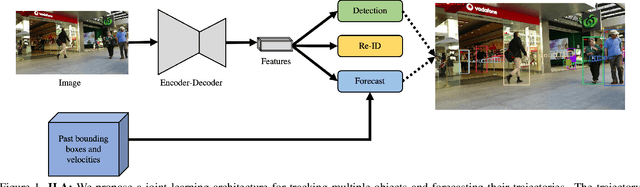
This paper introduces a joint learning architecture (JLA) for multiple object tracking (MOT) and trajectory forecasting in which the goal is to predict objects' current and future trajectories simultaneously. Motion prediction is widely used in several state of the art MOT methods to refine predictions in the form of bounding boxes. Typically, a Kalman Filter provides short-term estimations to help trackers correctly predict objects' locations in the current frame. However, the Kalman Filter-based approaches cannot predict non-linear trajectories. We propose to jointly train a tracking and trajectory forecasting model and use the predicted trajectory forecasts for short-term motion estimates in lieu of linear motion prediction methods such as the Kalman filter. We evaluate our JLA on the MOTChallenge benchmark. Evaluations result show that JLA performs better for short-term motion prediction and reduces ID switches by 33%, 31%, and 47% in the MOT16, MOT17, and MOT20 datasets, respectively, in comparison to FairMOT.
Near Real-Time Social Distancing in London
Dec 07, 2020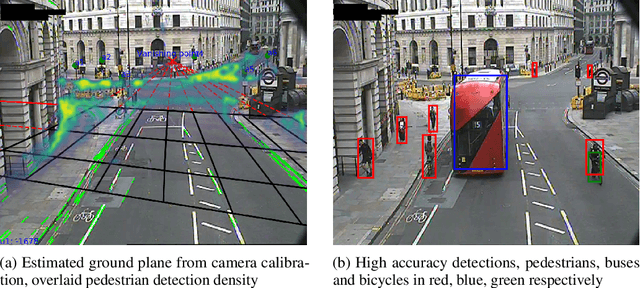
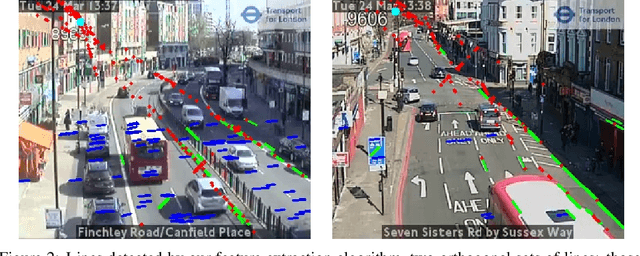
During the COVID-19 pandemic, policy makers at the Greater London Authority, the regional governance body of London, UK, are reliant upon prompt and accurate data sources. Large well-defined heterogeneous compositions of activity throughout the city are sometimes difficult to acquire, yet are a necessity in order to learn 'busyness' and consequently make safe policy decisions. One component of our project within this space is to utilise existing infrastructure to estimate social distancing adherence by the general public. Our method enables near immediate sampling and contextualisation of activity and physical distancing on the streets of London via live traffic camera feeds. We introduce a framework for inspecting and improving upon existing methods, whilst also describing its active deployment on over 900 real-time feeds.