 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnd-to-End Learned Event- and Image-based Visual Odometry
Sep 18, 2023Visual Odometry (VO) is crucial for autonomous robotic navigation, especially in GPS-denied environments like planetary terrains. While standard RGB cameras struggle in low-light or high-speed motion, event-based cameras offer high dynamic range and low latency. However, seamlessly integrating asynchronous event data with synchronous frames remains challenging. We introduce RAMP-VO, the first end-to-end learned event- and image-based VO system. It leverages novel Recurrent, Asynchronous, and Massively Parallel (RAMP) encoders that are 8x faster and 20% more accurate than existing asynchronous encoders. RAMP-VO further employs a novel pose forecasting technique to predict future poses for initialization. Despite being trained only in simulation, RAMP-VO outperforms image- and event-based methods by 52% and 20%, respectively, on traditional, real-world benchmarks as well as newly introduced Apollo and Malapert landing sequences, paving the way for robust and asynchronous VO in space.
Using Convolutional Neural Networks for Relative Pose Estimation of a Non-Cooperative Spacecraft with Thermal Infrared Imagery
May 28, 2021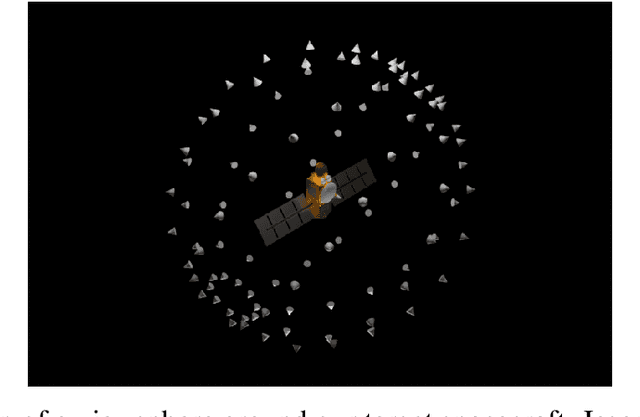
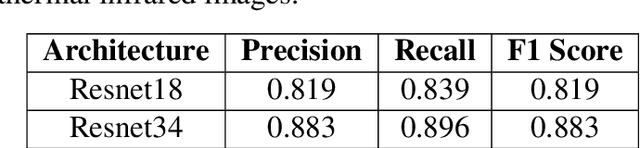
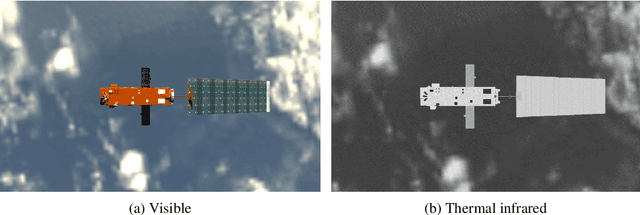
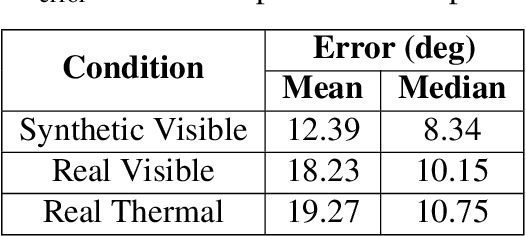
Recent interest in on-orbit servicing and Active Debris Removal (ADR) missions have driven the need for technologies to enable non-cooperative rendezvous manoeuvres. Such manoeuvres put heavy burden on the perception capabilities of a chaser spacecraft. This paper demonstrates Convolutional Neural Networks (CNNs) capable of providing an initial coarse pose estimation of a target from a passive thermal infrared camera feed. Thermal cameras offer a promising alternative to visible cameras, which struggle in low light conditions and are susceptible to overexposure. Often, thermal information on the target is not available a priori; this paper therefore proposes using visible images to train networks. The robustness of the models is demonstrated on two different targets, first on synthetic data, and then in a laboratory environment for a realistic scenario that might be faced during an ADR mission. Given that there is much concern over the use of CNN in critical applications due to their black box nature, we use innovative techniques to explain what is important to our network and fault conditions.