 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRockmate: an Efficient, Fast, Automatic and Generic Tool for Re-materialization in PyTorch
Jul 03, 2023



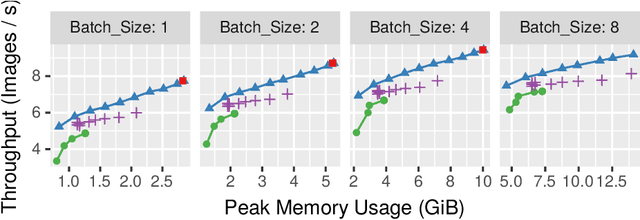
We propose Rockmate to control the memory requirements when training PyTorch DNN models. Rockmate is an automatic tool that starts from the model code and generates an equivalent model, using a predefined amount of memory for activations, at the cost of a few re-computations. Rockmate automatically detects the structure of computational and data dependencies and rewrites the initial model as a sequence of complex blocks. We show that such a structure is widespread and can be found in many models in the literature (Transformer based models, ResNet, RegNets,...). This structure allows us to solve the problem in a fast and efficient way, using an adaptation of Checkmate (too slow on the whole model but general) at the level of individual blocks and an adaptation of Rotor (fast but limited to sequential models) at the level of the sequence itself. We show through experiments on many models that Rockmate is as fast as Rotor and as efficient as Checkmate, and that it allows in many cases to obtain a significantly lower memory consumption for activations (by a factor of 2 to 5) for a rather negligible overhead (of the order of 10% to 20%). Rockmate is open source and available at https://github.com/topal-team/rockmate.
Survey on Large Scale Neural Network Training
Feb 21, 2022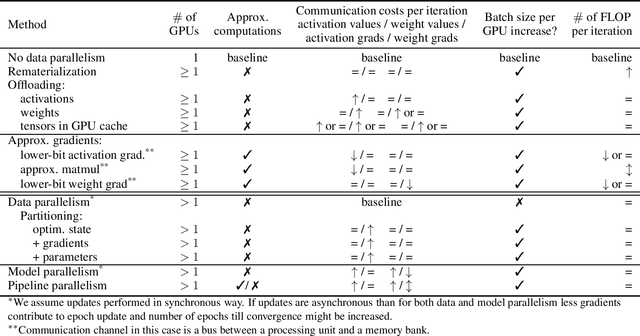
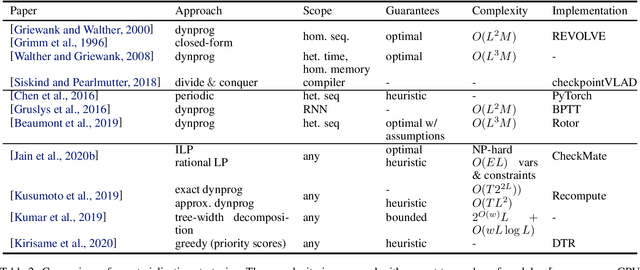
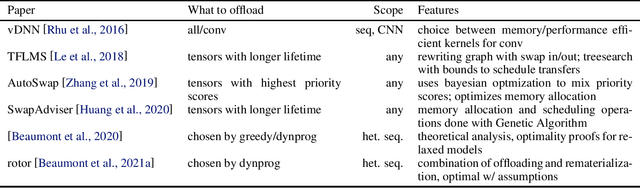
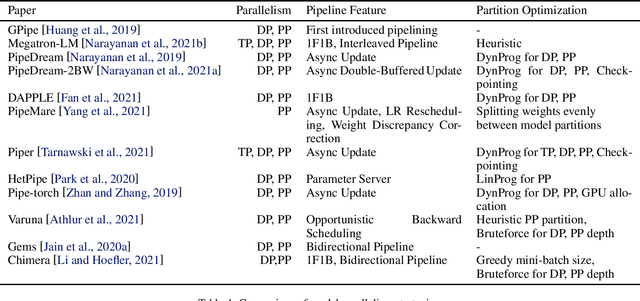
Modern Deep Neural Networks (DNNs) require significant memory to store weight, activations, and other intermediate tensors during training. Hence, many models do not fit one GPU device or can be trained using only a small per-GPU batch size. This survey provides a systematic overview of the approaches that enable more efficient DNNs training. We analyze techniques that save memory and make good use of computation and communication resources on architectures with a single or several GPUs. We summarize the main categories of strategies and compare strategies within and across categories. Along with approaches proposed in the literature, we discuss available implementations.
Geometric Deep Reinforcement Learning for Dynamic DAG Scheduling
Nov 09, 2020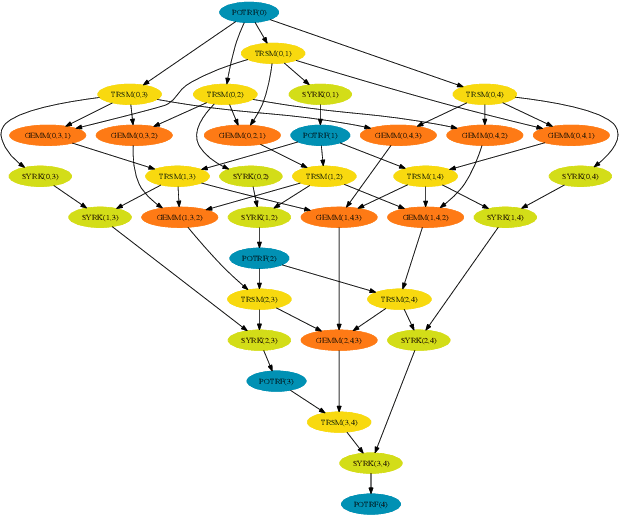



In practice, it is quite common to face combinatorial optimization problems which contain uncertainty along with non-determinism and dynamicity. These three properties call for appropriate algorithms; reinforcement learning (RL) is dealing with them in a very natural way. Today, despite some efforts, most real-life combinatorial optimization problems remain out of the reach of reinforcement learning algorithms. In this paper, we propose a reinforcement learning approach to solve a realistic scheduling problem, and apply it to an algorithm commonly executed in the high performance computing community, the Cholesky factorization. On the contrary to static scheduling, where tasks are assigned to processors in a predetermined ordering before the beginning of the parallel execution, our method is dynamic: task allocations and their execution ordering are decided at runtime, based on the system state and unexpected events, which allows much more flexibility. To do so, our algorithm uses graph neural networks in combination with an actor-critic algorithm (A2C) to build an adaptive representation of the problem on the fly. We show that this approach is competitive with state-of-the-art heuristics used in high-performance computing runtime systems. Moreover, our algorithm does not require an explicit model of the environment, but we demonstrate that extra knowledge can easily be incorporated and improves performance. We also exhibit key properties provided by this RL approach, and study its transfer abilities to other instances.
Optimal checkpointing for heterogeneous chains: how to train deep neural networks with limited memory
Nov 27, 2019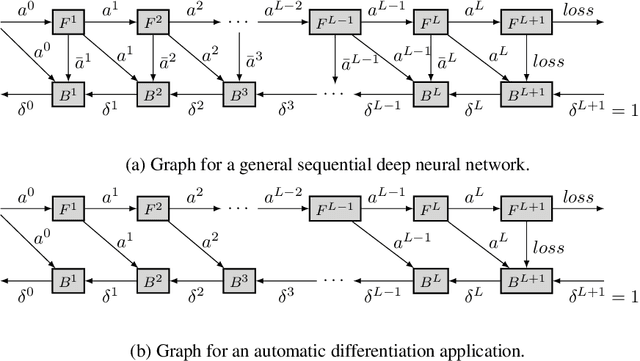
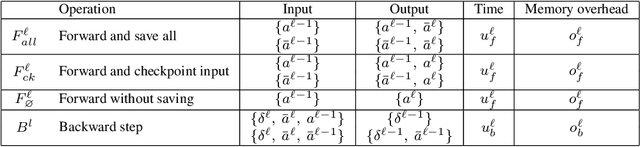
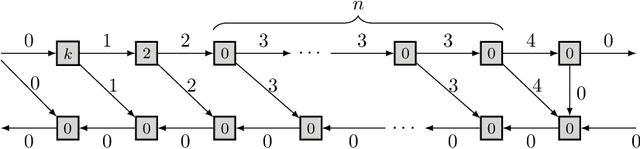
This paper introduces a new activation checkpointing method which allows to significantly decrease memory usage when training Deep Neural Networks with the back-propagation algorithm. Similarly to checkpoint-ing techniques coming from the literature on Automatic Differentiation, it consists in dynamically selecting the forward activations that are saved during the training phase, and then automatically recomputing missing activations from those previously recorded. We propose an original computation model that combines two types of activation savings: either only storing the layer inputs, or recording the complete history of operations that produced the outputs (this uses more memory, but requires fewer recomputations in the backward phase), and we provide an algorithm to compute the optimal computation sequence for this model. This paper also describes a PyTorch implementation that processes the entire chain, dealing with any sequential DNN whose internal layers may be arbitrarily complex and automatically executing it according to the optimal checkpointing strategy computed given a memory limit. Through extensive experiments, we show that our implementation consistently outperforms existing checkpoint-ing approaches for a large class of networks, image sizes and batch sizes.