 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGraph-based Robot Localization Using a Graph Neural Network with a Floor Camera and a Feature Rich Industrial Floor
Aug 08, 2025Accurate localization represents a fundamental challenge in robotic navigation. Traditional methodologies, such as Lidar or QR-code based systems, suffer from inherent scalability and adaptability con straints, particularly in complex environments. In this work, we propose an innovative localization framework that harnesses flooring characteris tics by employing graph-based representations and Graph Convolutional Networks (GCNs). Our method uses graphs to represent floor features, which helps localize the robot more accurately (0.64cm error) and more efficiently than comparing individual image features. Additionally, this approach successfully addresses the kidnapped robot problem in every frame without requiring complex filtering processes. These advancements open up new possibilities for robotic navigation in diverse environments.
Robot Localization Using a Learned Keypoint Detector and Descriptor with a Floor Camera and a Feature Rich Industrial Floor
Apr 04, 2025The localization of moving robots depends on the availability of good features from the environment. Sensor systems like Lidar are popular, but unique features can also be extracted from images of the ground. This work presents the Keypoint Localization Framework (KOALA), which utilizes deep neural networks that extract sufficient features from an industrial floor for accurate localization without having readable markers. For this purpose, we use a floor covering that can be produced as cheaply as common industrial floors. Although we do not use any filtering, prior, or temporal information, we can estimate our position in 75.7 % of all images with a mean position error of 2 cm and a rotation error of 2.4 %. Thus, the robot kidnapping problem can be solved with high precision in every frame, even while the robot is moving. Furthermore, we show that our framework with our detector and descriptor combination is able to outperform comparable approaches.
Obtaining Robust Control and Navigation Policies for Multi-Robot Navigation via Deep Reinforcement Learning
Sep 07, 2022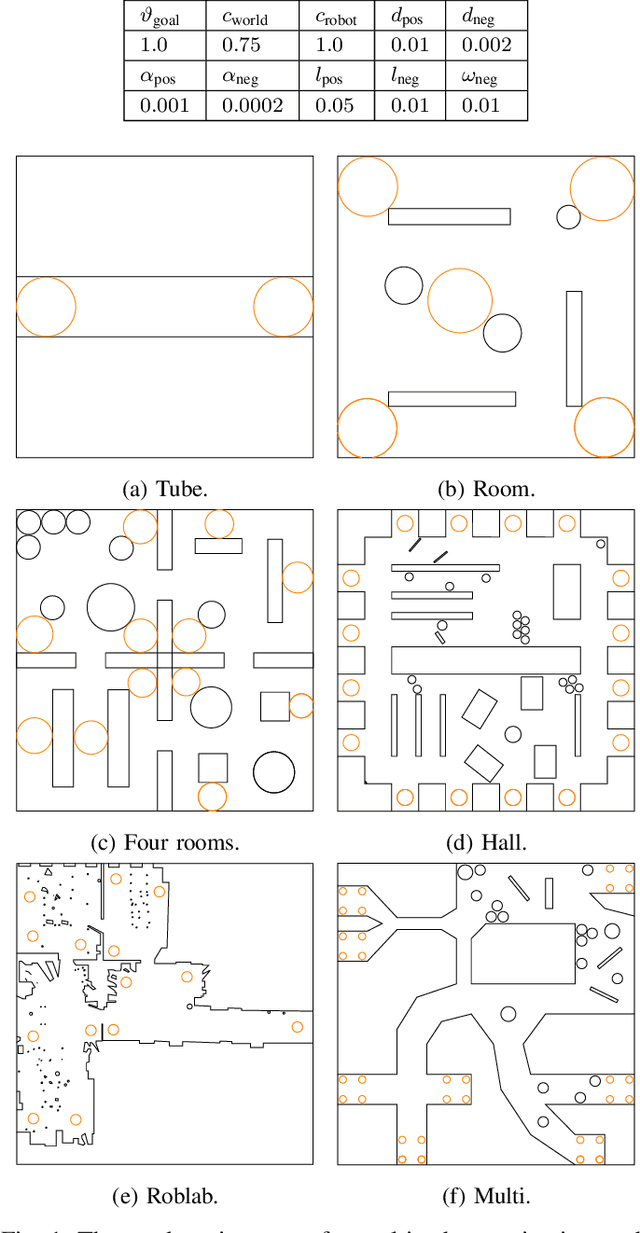
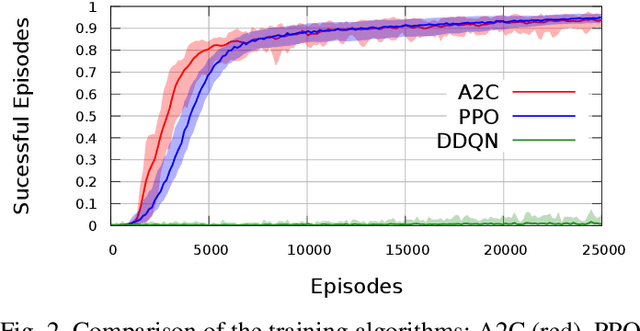
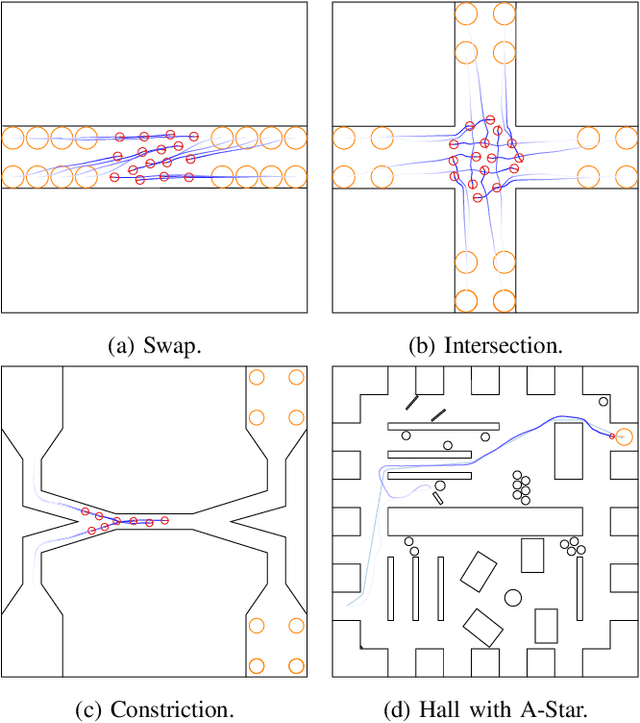
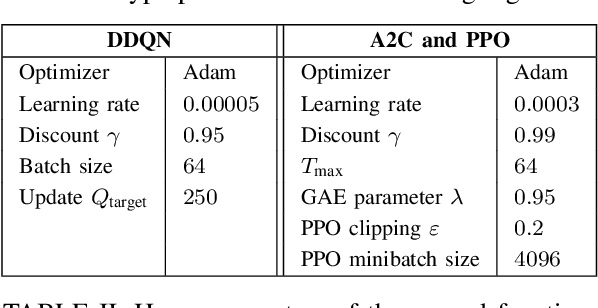
Multi-robot navigation is a challenging task in which multiple robots must be coordinated simultaneously within dynamic environments. We apply deep reinforcement learning (DRL) to learn a decentralized end-to-end policy which maps raw sensor data to the command velocities of the agent. In order to enable the policy to generalize, the training is performed in different environments and scenarios. The learned policy is tested and evaluated in common multi-robot scenarios like switching a place, an intersection and a bottleneck situation. This policy allows the agent to recover from dead ends and to navigate through complex environments.
Online and Real-Time Tracking in a Surveillance Scenario
Jun 02, 2021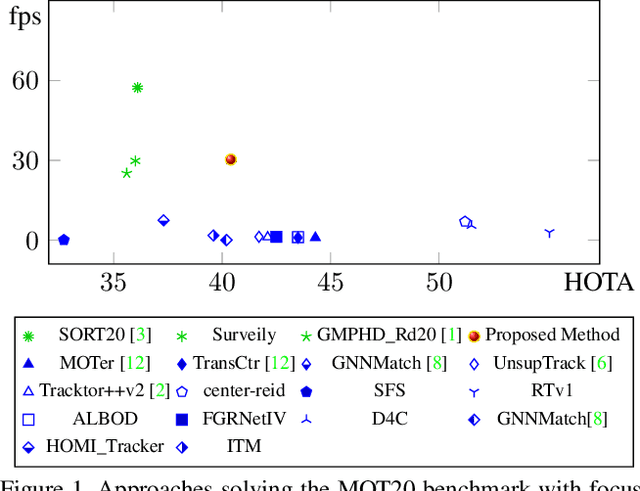

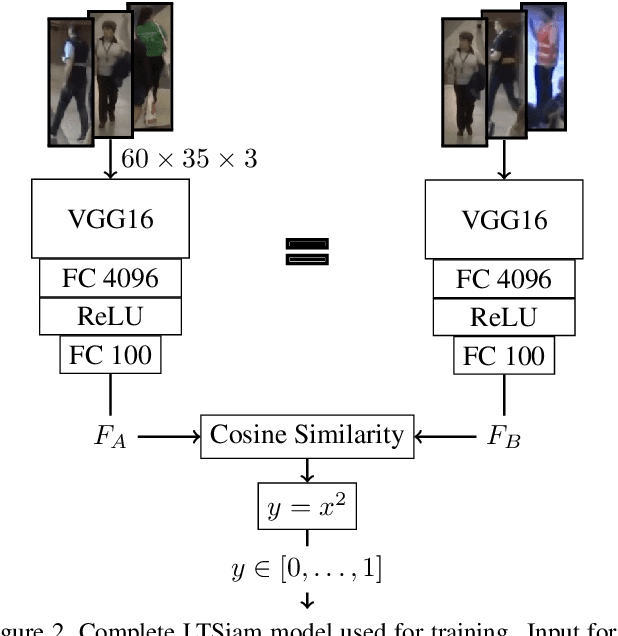
This paper presents an approach for tracking in a surveillance scenario. Typical aspects for this scenario are a 24/7 operation with a static camera mounted above the height of a human with many objects or people. The Multiple Object Tracking Benchmark 20 (MOT20) reflects this scenario best. We can show that our approach is real-time capable on this benchmark and outperforms all other real-time capable approaches in HOTA, MOTA, and IDF1. We achieve this by contributing a fast Siamese network reformulated for linear runtime (instead of quadratic) to generate fingerprints from detections. Thus, it is possible to associate the detections to Kalman filters based on multiple tracking specific ratings: Cosine similarity of fingerprints, Intersection over Union, and pixel distance ratio in the image.
A C Code Generator for Fast Inference and Simple Deployment of Convolutional Neural Networks on Resource Constrained Systems
Jan 14, 2020
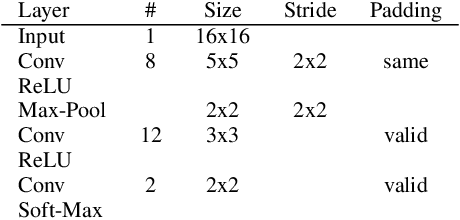
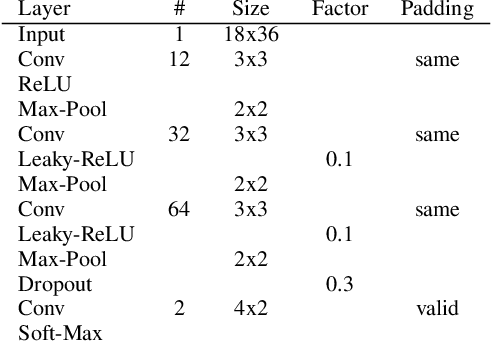
Inference of Convolutional Neural Networks in time critical applications usually requires a GPU. In robotics or embedded devices these are often not available due to energy, space and cost constraints. Furthermore, installation of a deep learning framework or even a native compiler on the target platform is not possible. This paper presents a neural network code generator (NNCG) that generates from a trained CNN a plain ANSI C code file that encapsulates the inference in single a function. It can easily be included in existing projects and due to lack of dependencies, cross compilation is usually possible. Additionally, the code generation is optimized based on the known trained CNN and target platform following four design principles. The system is evaluated utilizing small CNN designed for this application. Compared to TensorFlow XLA and Glow speed-ups of up to 11.81 can be shown and even GPUs are outperformed regarding latency.