 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAccuracy evaluation of a Low-Cost Differential Global Positioning System for mobile robotics
Jun 22, 2023Differential GPS, commonly referred as DGPS, is a well-known and very accurate localization system for many outdoor applications in particular for mobile outdoor robotics. The most common drawback of DGPS systems are the high costs for both base station and receivers. In this paper, we present a setup that uses third-party open-source software and a Ublox ZED-F9P chip to build a ROS-enabled low-cost DGPS setup that is ready to use in a few hours. The main goal of this paper is to analyze and evaluate the repetitive and absolute accuracy of the system. The first measurement also examines the differences between a SAPOS base station and a locally installed one consisting of low-cost components. During the evaluation process of the absolute accuracy, a moving mobile robot is used on the receiver side. It is tracked through a highly accurate VICON motion capture system.
Obtaining Robust Control and Navigation Policies for Multi-Robot Navigation via Deep Reinforcement Learning
Sep 07, 2022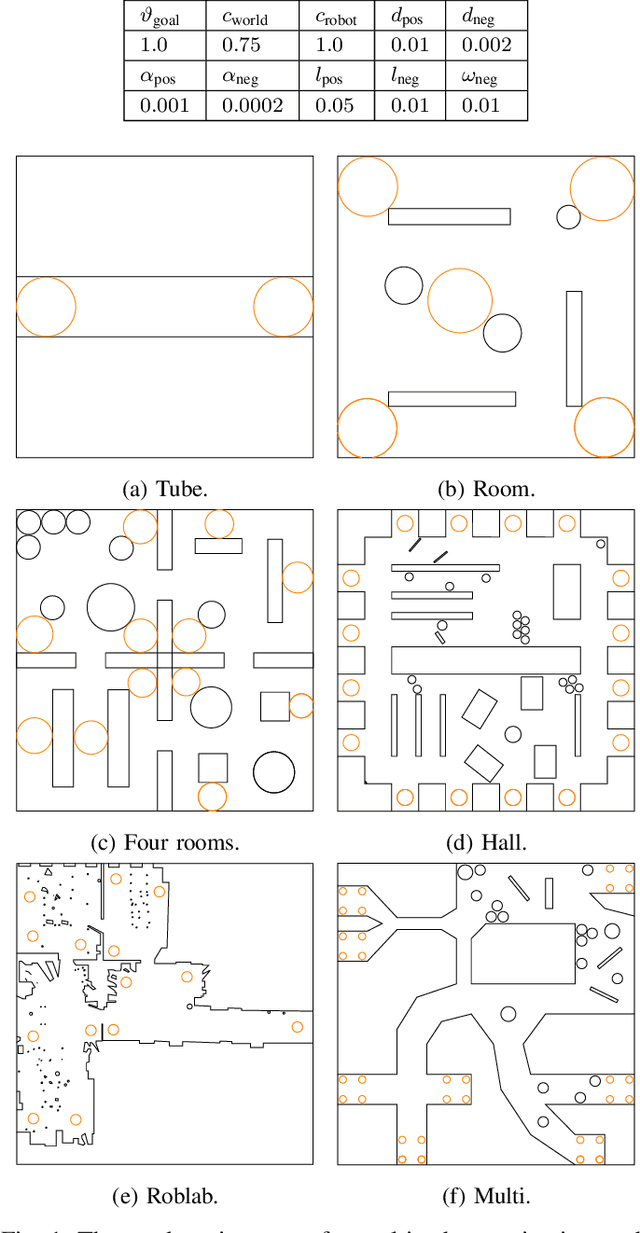
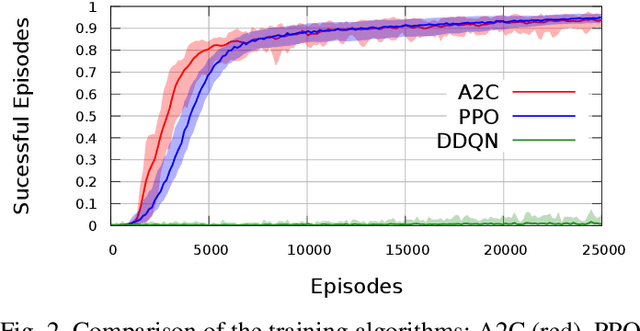
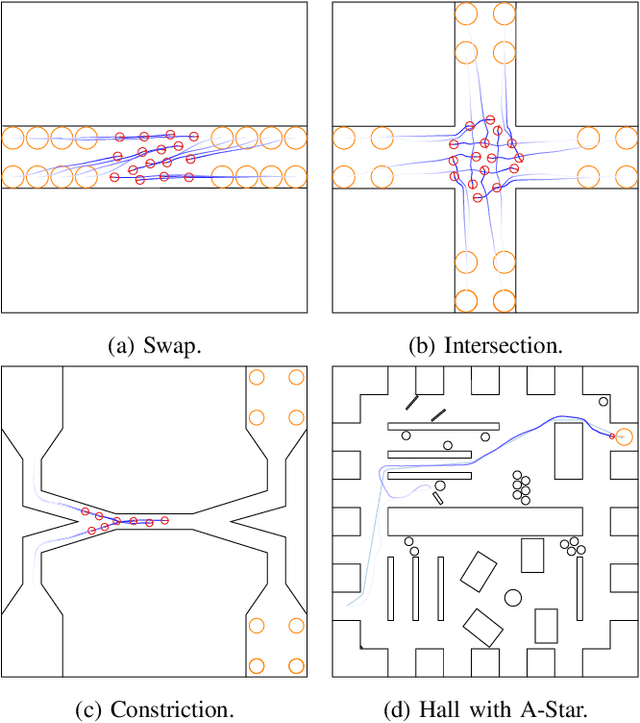
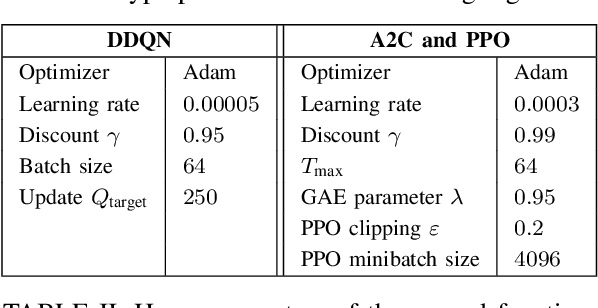
Multi-robot navigation is a challenging task in which multiple robots must be coordinated simultaneously within dynamic environments. We apply deep reinforcement learning (DRL) to learn a decentralized end-to-end policy which maps raw sensor data to the command velocities of the agent. In order to enable the policy to generalize, the training is performed in different environments and scenarios. The learned policy is tested and evaluated in common multi-robot scenarios like switching a place, an intersection and a bottleneck situation. This policy allows the agent to recover from dead ends and to navigate through complex environments.