Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObtaining Robust Control and Navigation Policies for Multi-Robot Navigation via Deep Reinforcement Learning
Sep 07, 2022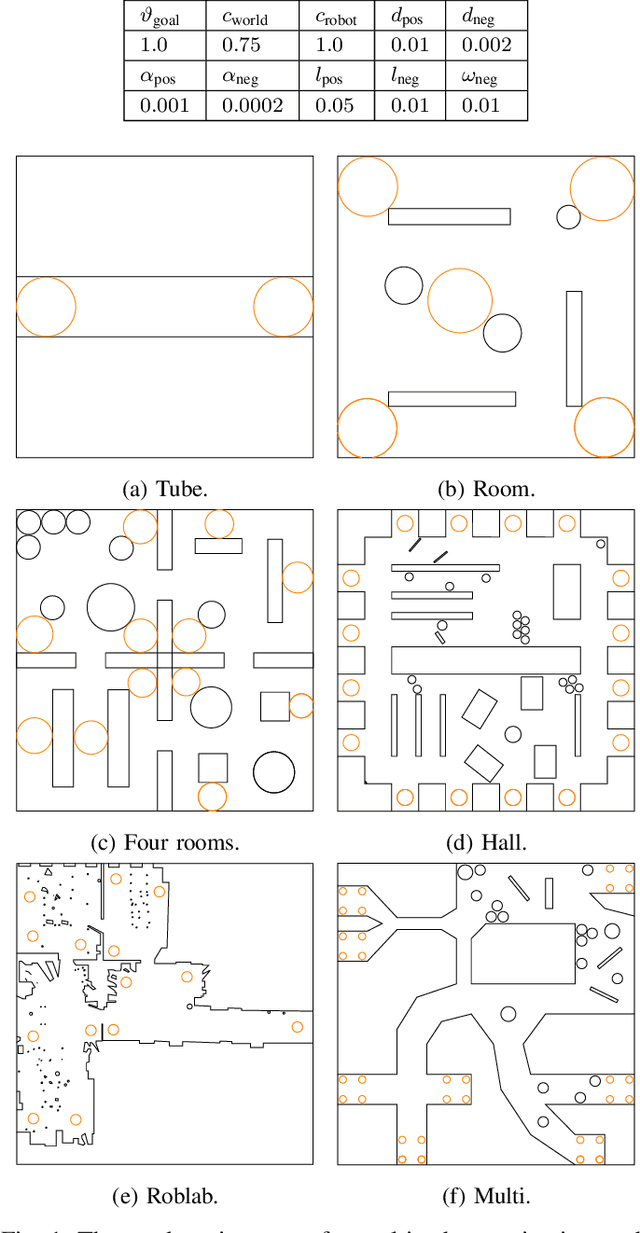
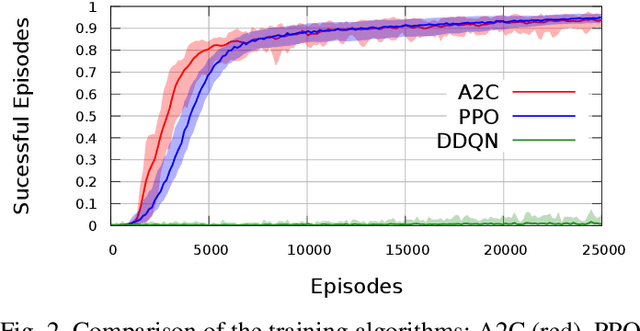
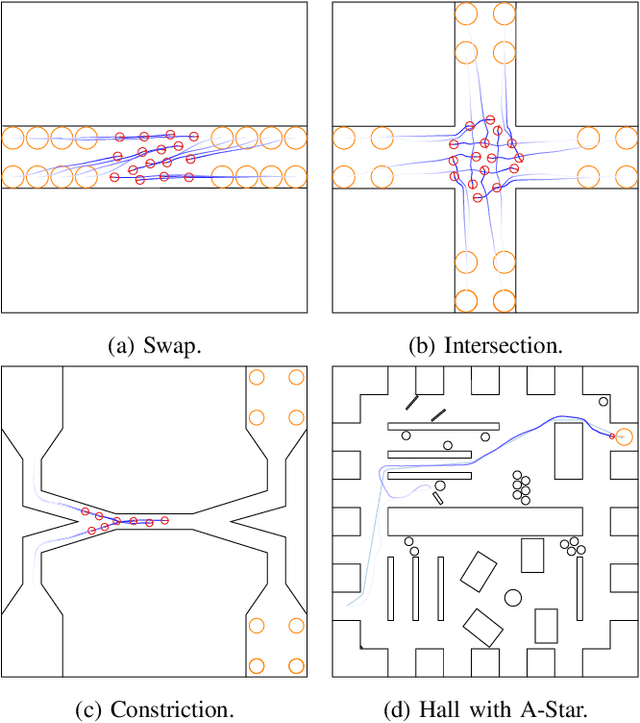
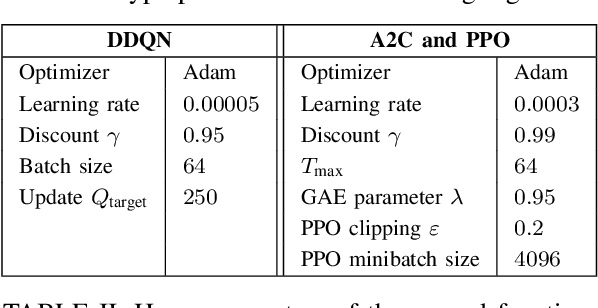
Multi-robot navigation is a challenging task in which multiple robots must be coordinated simultaneously within dynamic environments. We apply deep reinforcement learning (DRL) to learn a decentralized end-to-end policy which maps raw sensor data to the command velocities of the agent. In order to enable the policy to generalize, the training is performed in different environments and scenarios. The learned policy is tested and evaluated in common multi-robot scenarios like switching a place, an intersection and a bottleneck situation. This policy allows the agent to recover from dead ends and to navigate through complex environments.
* 13 pages
Via