 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEfficient Single Object Detection on Image Patches with Early Exit Enhanced High-Precision CNNs
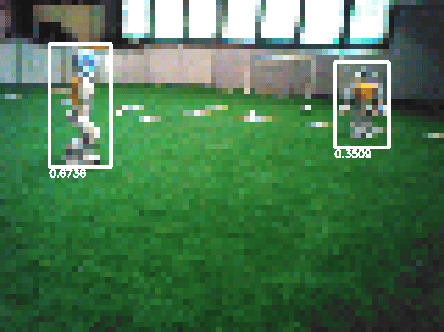
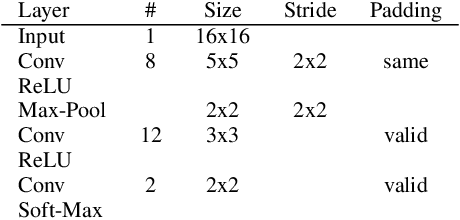
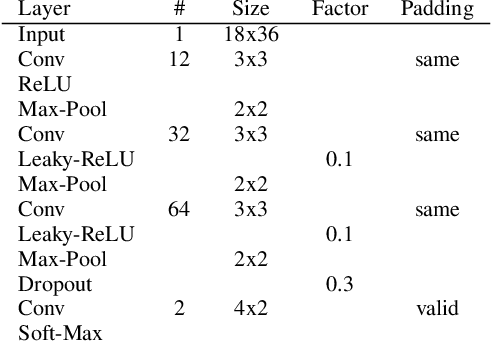
Sep 07, 2023This paper proposes a novel approach for detecting objects using mobile robots in the context of the RoboCup Standard Platform League, with a primary focus on detecting the ball. The challenge lies in detecting a dynamic object in varying lighting conditions and blurred images caused by fast movements. To address this challenge, the paper presents a convolutional neural network architecture designed specifically for computationally constrained robotic platforms. The proposed CNN is trained to achieve high precision classification of single objects in image patches and to determine their precise spatial positions. The paper further integrates Early Exits into the existing high-precision CNN architecture to reduce the computational cost of easily rejectable cases in the background class. The training process involves a composite loss function based on confidence and positional losses with dynamic weighting and data augmentation. The proposed approach achieves a precision of 100% on the validation dataset and a recall of almost 87%, while maintaining an execution time of around 170 $\mu$s per hypotheses. By combining the proposed approach with an Early Exit, a runtime optimization of more than 28%, on average, can be achieved compared to the original CNN. Overall, this paper provides an efficient solution for an enhanced detection of objects, especially the ball, in computationally constrained robotic platforms.
A C Code Generator for Fast Inference and Simple Deployment of Convolutional Neural Networks on Resource Constrained Systems
Jan 14, 2020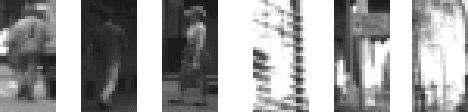
Inference of Convolutional Neural Networks in time critical applications usually requires a GPU. In robotics or embedded devices these are often not available due to energy, space and cost constraints. Furthermore, installation of a deep learning framework or even a native compiler on the target platform is not possible. This paper presents a neural network code generator (NNCG) that generates from a trained CNN a plain ANSI C code file that encapsulates the inference in single a function. It can easily be included in existing projects and due to lack of dependencies, cross compilation is usually possible. Additionally, the code generation is optimized based on the known trained CNN and target platform following four design principles. The system is evaluated utilizing small CNN designed for this application. Compared to TensorFlow XLA and Glow speed-ups of up to 11.81 can be shown and even GPUs are outperformed regarding latency.