 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Mapping and Localization from High-Resolution Tactile Imprints
Apr 24, 2019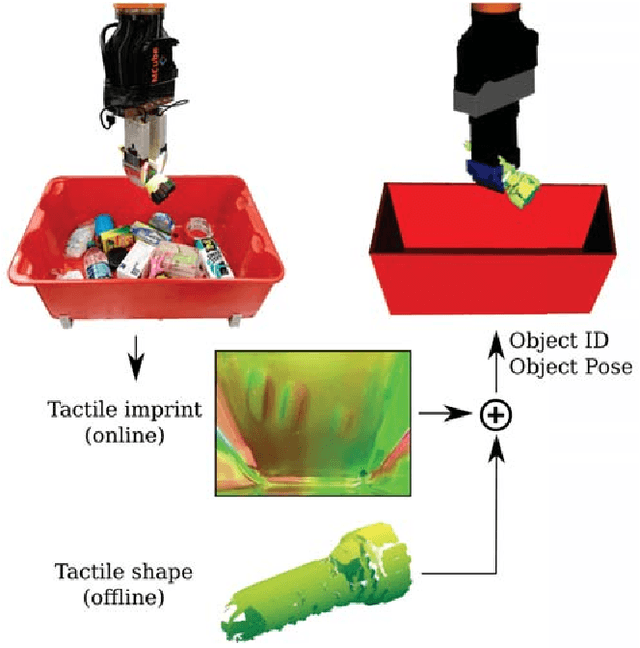

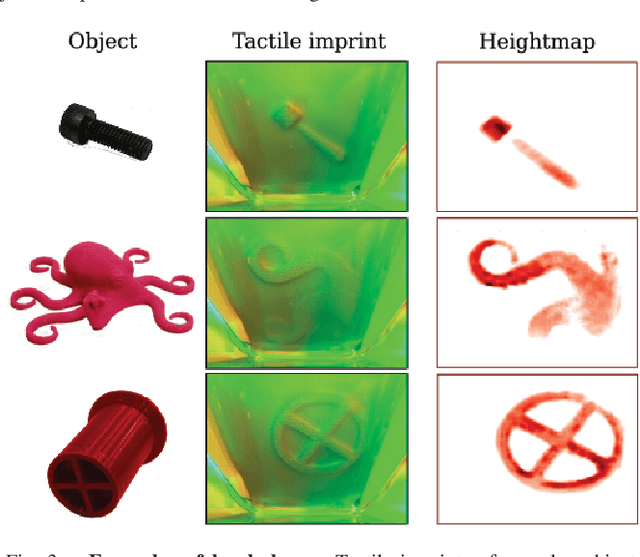
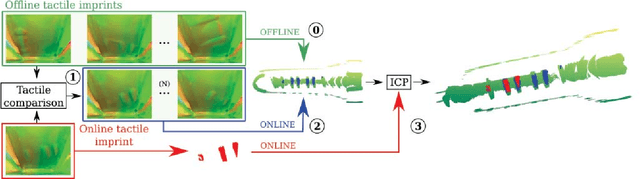
This work studies the problem of shape reconstruction and object localization using a vision-based tactile sensor, GelSlim. The main contributions are the recovery of local shapes from contact, an approach to reconstruct the tactile shape of objects from tactile imprints, and an accurate method for object localization of previously reconstructed objects. The algorithms can be applied to a large variety of 3D objects and provide accurate tactile feedback for in-hand manipulation. Results show that by exploiting the dense tactile information we can reconstruct the shape of objects with high accuracy and do on-line object identification and localization, opening the door to reactive manipulation guided by tactile sensing. We provide videos and supplemental information in the project's website http://web.mit.edu/mcube/research/tactile_localization.html.
Tactile Regrasp: Grasp Adjustments via Simulated Tactile Transformations
Oct 09, 2018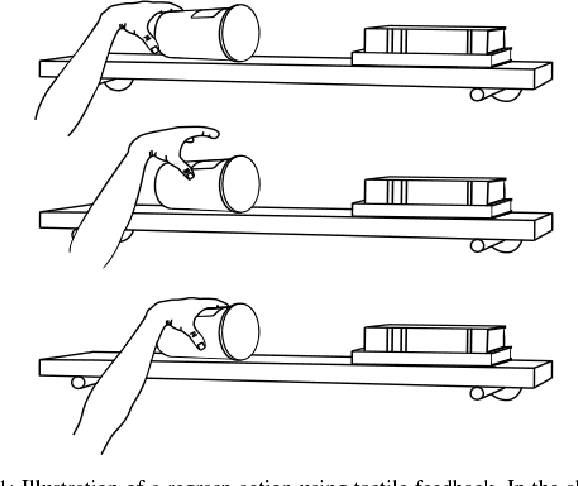
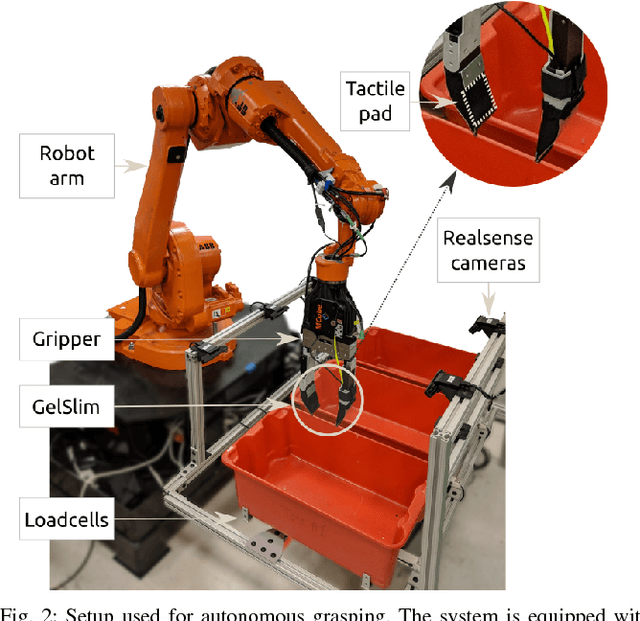
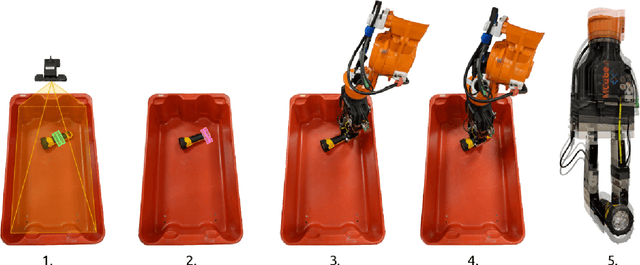
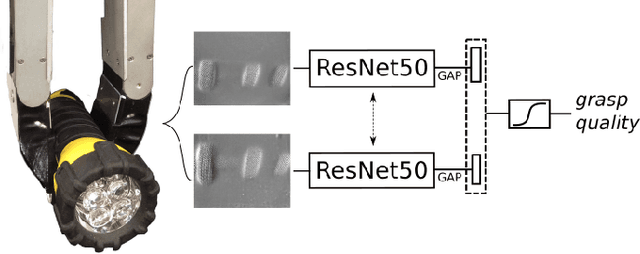
This paper presents a novel regrasp control policy that makes use of tactile sensing to plan local grasp adjustments. Our approach determines regrasp actions by virtually searching for local transformations of tactile measurements that improve the quality of the grasp. First, we construct a tactile-based grasp quality metric using a deep convolutional neural network trained on over 2800 grasps. The quality of each grasp, a continuous value between 0 and 1, is determined experimentally by measuring its resistance to external perturbations. Second, we simulate the tactile imprints associated with robot motions relative to the initial grasp by performing rigid-body transformations of the given tactile measurements. The newly generated tactile imprints are evaluated with the learned grasp quality network and the regrasp action is chosen to maximize the grasp quality. Results show that the grasp quality network can predict the outcome of grasps with an average accuracy of 85% on known objects and 75% on a cross validation set of 12 objects. The regrasp control policy improves the success rate of grasp actions by an average relative increase of 70% on a test set of 8 objects.
* Francois R. Hogan and Maria Bauza contributed equally to this work. 8 pages, 7 figures