 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTactile Mapping and Localization from High-Resolution Tactile Imprints
Paper and Code
Apr 24, 2019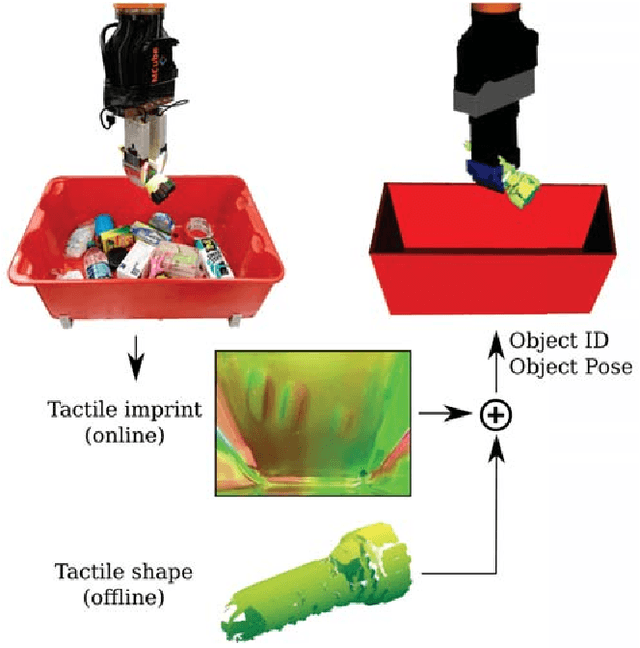

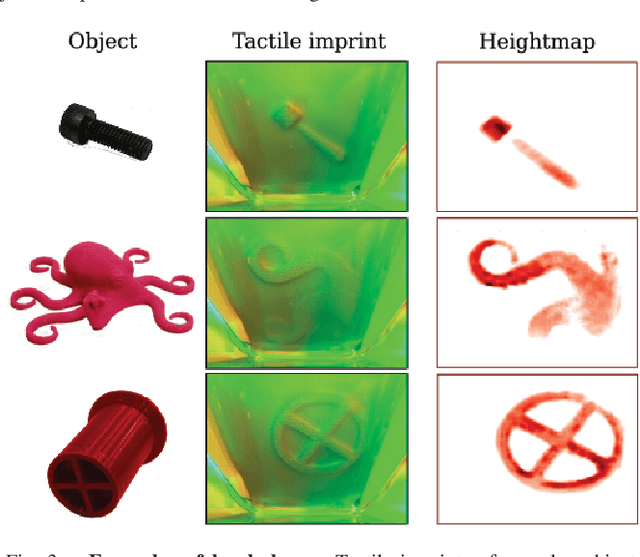
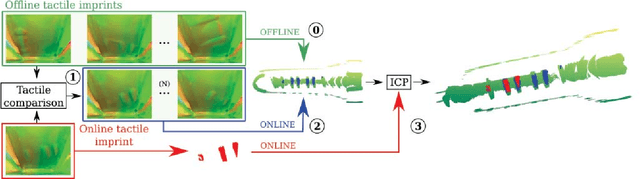
This work studies the problem of shape reconstruction and object localization using a vision-based tactile sensor, GelSlim. The main contributions are the recovery of local shapes from contact, an approach to reconstruct the tactile shape of objects from tactile imprints, and an accurate method for object localization of previously reconstructed objects. The algorithms can be applied to a large variety of 3D objects and provide accurate tactile feedback for in-hand manipulation. Results show that by exploiting the dense tactile information we can reconstruct the shape of objects with high accuracy and do on-line object identification and localization, opening the door to reactive manipulation guided by tactile sensing. We provide videos and supplemental information in the project's website http://web.mit.edu/mcube/research/tactile_localization.html.