 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEPTQ: Enhanced Post-Training Quantization via Label-Free Hessian
Sep 20, 2023Quantization of deep neural networks (DNN) has become a key element in the efforts of embedding such networks on end-user devices. However, current quantization methods usually suffer from costly accuracy degradation. In this paper, we propose a new method for Enhanced Post Training Quantization named EPTQ. The method is based on knowledge distillation with an adaptive weighting of layers. In addition, we introduce a new label-free technique for approximating the Hessian trace of the task loss, named Label-Free Hessian. This technique removes the requirement of a labeled dataset for computing the Hessian. The adaptive knowledge distillation uses the Label-Free Hessian technique to give greater attention to the sensitive parts of the model while performing the optimization. Empirically, by employing EPTQ we achieve state-of-the-art results on a wide variety of models, tasks, and datasets, including ImageNet classification, COCO object detection, and Pascal-VOC for semantic segmentation. We demonstrate the performance and compatibility of EPTQ on an extended set of architectures, including CNNs, Transformers, hybrid, and MLP-only models.
Cooperative Multi-Agent Path Finding: Beyond Path Planning and Collision Avoidance
May 23, 2021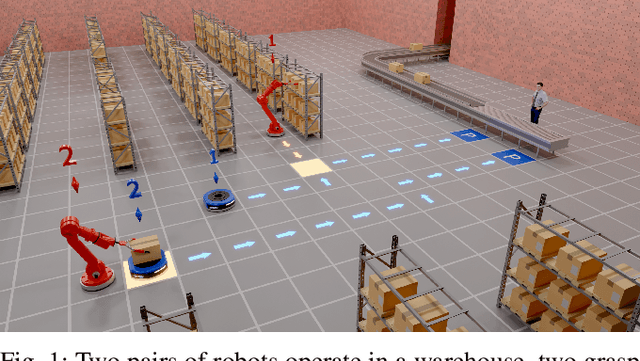
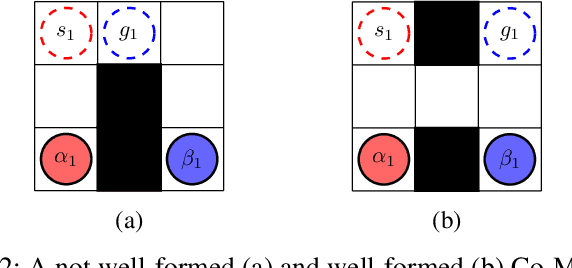
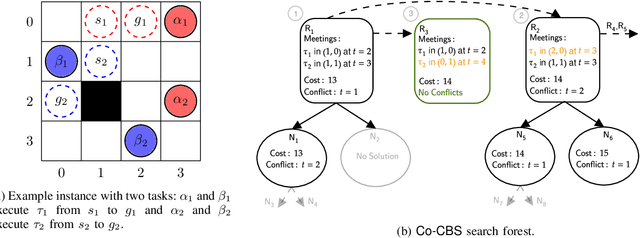
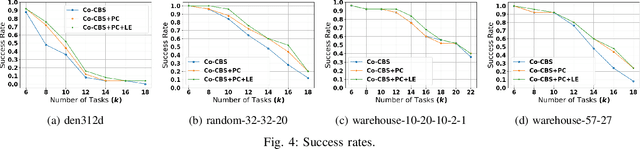
We introduce the Cooperative Multi-Agent Path Finding (Co-MAPF) problem, an extension to the classical MAPF problem, where cooperative behavior is incorporated. In this setting, a group of autonomous agents operate in a shared environment and have to complete cooperative tasks while avoiding collisions with the other agents in the group. This extension naturally models many real-world applications, where groups of agents are required to collaborate in order to complete a given task. To this end, we formalize the Co-MAPF problem and introduce Cooperative Conflict-Based Search (Co-CBS), a CBS-based algorithm for solving the problem optimally for a wide set of Co-MAPF problems. Co-CBS uses a cooperation-planning module integrated into CBS such that cooperation planning is decoupled from path planning. Finally, we present empirical results on several MAPF benchmarks demonstrating our algorithm's properties.
Revisiting the Complexity Analysis of Conflict-Based Search: New Computational Techniques and Improved Bounds
Apr 18, 2021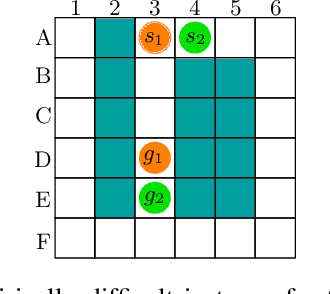
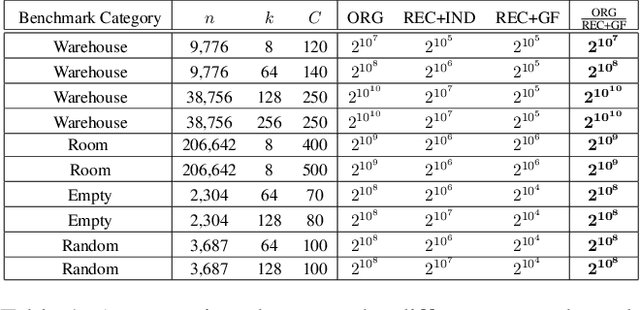
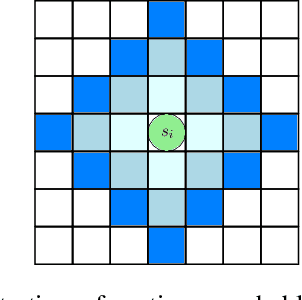
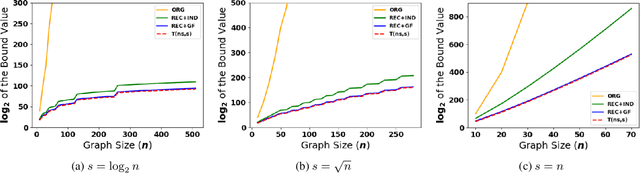
The problem of Multi-Agent Path Finding (MAPF) calls for finding a set of conflict-free paths for a fleet of agents operating in a given environment. Arguably, the state-of-the-art approach to computing optimal solutions is Conflict-Based Search (CBS). In this work we revisit the complexity analysis of CBS to provide tighter bounds on the algorithm's run-time in the worst-case. Our analysis paves the way to better pinpoint the parameters that govern (in the worst case) the algorithm's computational complexity. Our analysis is based on two complementary approaches: In the first approach we bound the run-time using the size of a Multi-valued Decision Diagram (MDD) -- a layered graph which compactly contains all possible single-agent paths between two given vertices for a specific path length. In the second approach we express the running time by a novel recurrence relation which bounds the algorithm's complexity. We use generating functions-based analysis in order to tightly bound the recurrence. Using these technique we provide several new upper-bounds on CBS's complexity. The results allow us to improve the existing bound on the running time of CBS for many cases. For example, on a set of common benchmarks we improve the upper-bound by a factor of at least $2^{10^{7}}$.