 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotion Generation for Food Topping Challenge 2024: Serving Salmon Roe Bowl and Picking Fried Chicken
Apr 30, 2025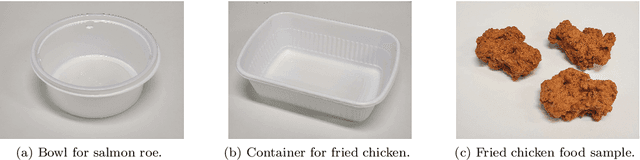

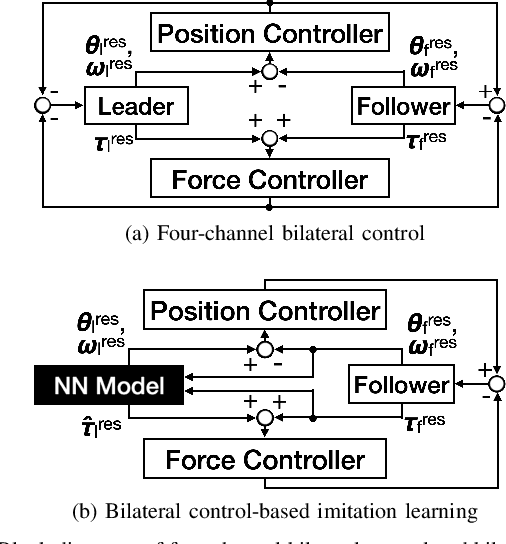
Although robots have been introduced in many industries, food production robots are yet to be widely employed because the food industry requires not only delicate movements to handle food but also complex movements that adapt to the environment. Force control is important for handling delicate objects such as food. In addition, achieving complex movements is possible by making robot motions based on human teachings. Four-channel bilateral control is proposed, which enables the simultaneous teaching of position and force information. Moreover, methods have been developed to reproduce motions obtained through human teachings and generate adaptive motions using learning. We demonstrated the effectiveness of these methods for food handling tasks in the Food Topping Challenge at the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024). For the task of serving salmon roe on rice, we achieved the best performance because of the high reproducibility and quick motion of the proposed method. Further, for the task of picking fried chicken, we successfully picked the most pieces of fried chicken among all participating teams. This paper describes the implementation and performance of these methods.
Variable-Speed Teaching-Playback as Real-World Data Augmentation for Imitation Learning
Dec 04, 2024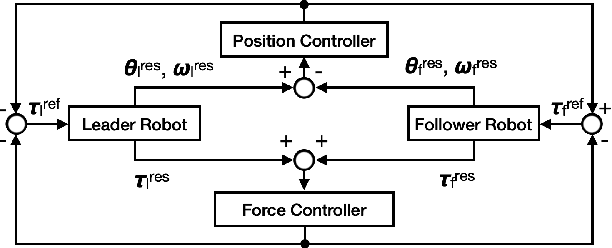

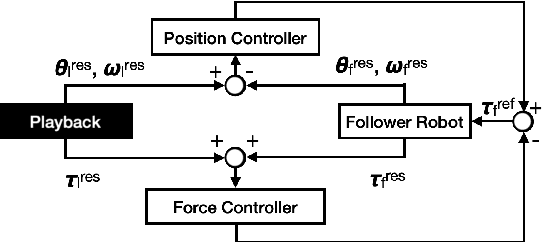

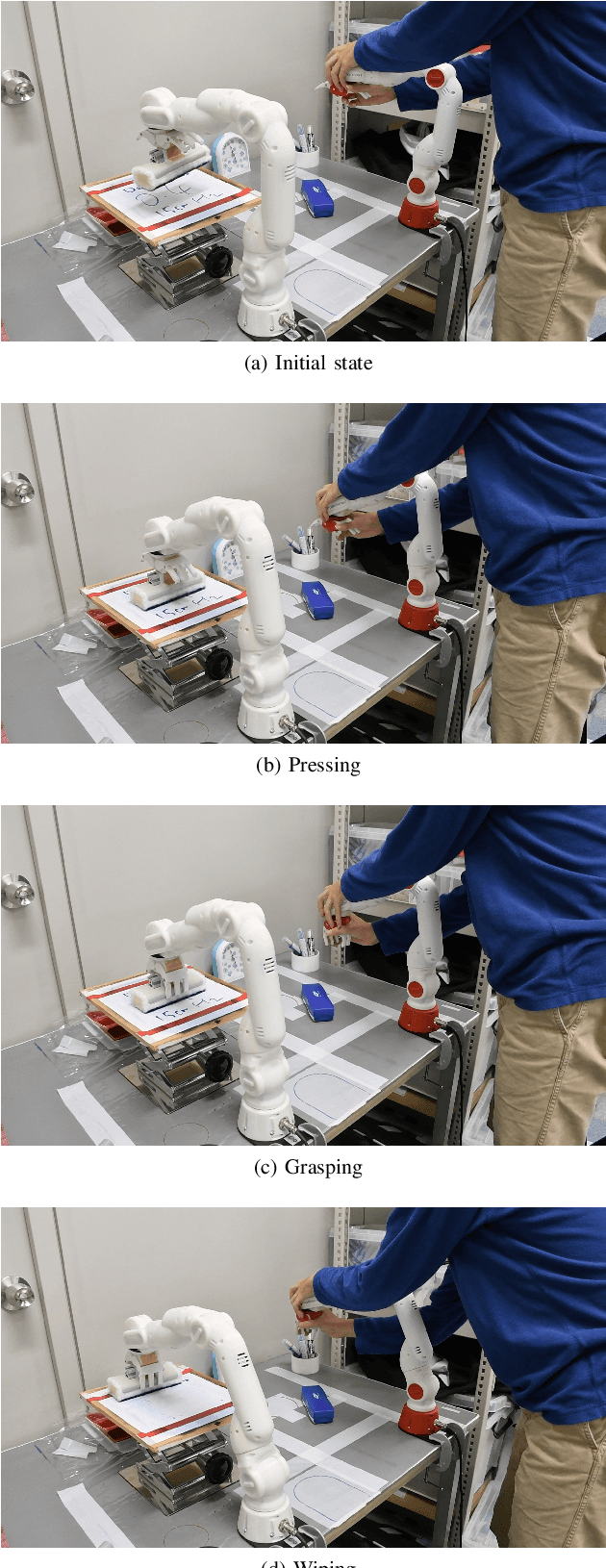
Because imitation learning relies on human demonstrations in hard-to-simulate settings, the inclusion of force control in this method has resulted in a shortage of training data, even with a simple change in speed. Although the field of data augmentation has addressed the lack of data, conventional methods of data augmentation for robot manipulation are limited to simulation-based methods or downsampling for position control. This paper proposes a novel method of data augmentation that is applicable to force control and preserves the advantages of real-world datasets. We applied teaching-playback at variable speeds as real-world data augmentation to increase both the quantity and quality of environmental reactions at variable speeds. An experiment was conducted on bilateral control-based imitation learning using a method of imitation learning equipped with position-force control. We evaluated the effect of real-world data augmentation on two tasks, pick-and-place and wiping, at variable speeds, each from two human demonstrations at fixed speed. The results showed a maximum 55% increase in success rate from a simple change in speed of real-world reactions and improved accuracy along the duration/frequency command by gathering environmental reactions at variable speeds.
Variable-Frequency Imitation Learning for Variable-Speed Motion
Nov 19, 2024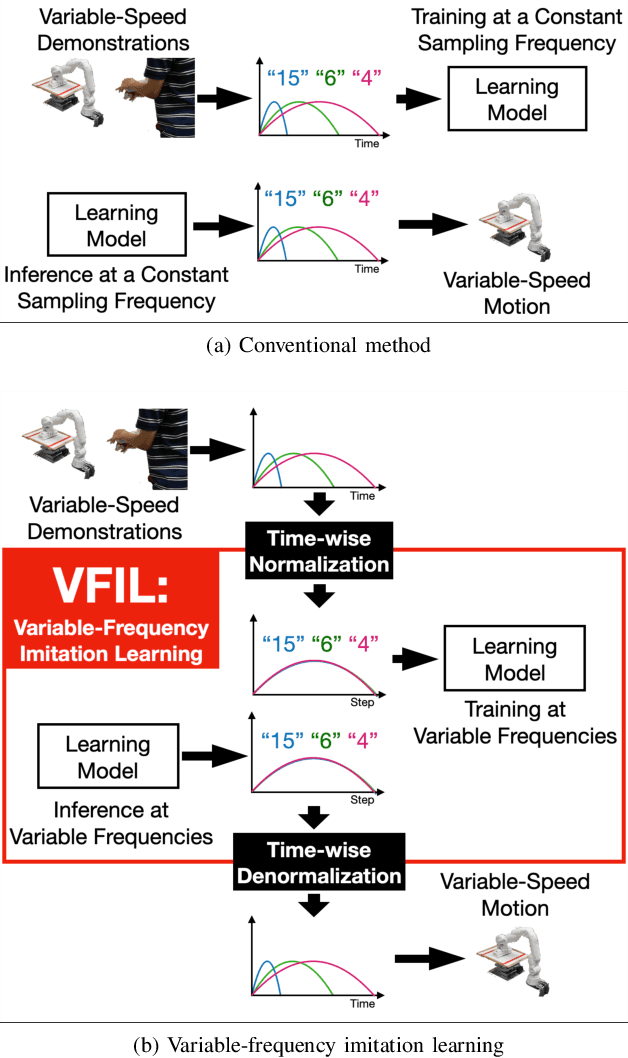
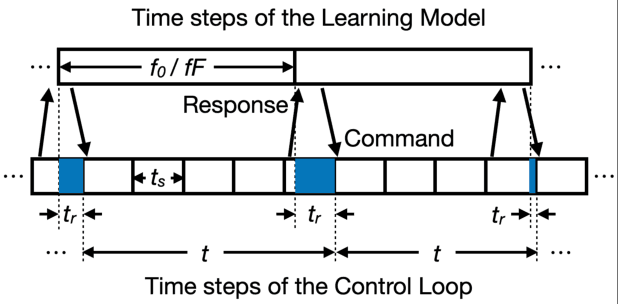
Conventional methods of imitation learning for variable-speed motion have difficulty extrapolating speeds because they rely on learning models running at a constant sampling frequency. This study proposes variable-frequency imitation learning (VFIL), a novel method for imitation learning with learning models trained to run at variable sampling frequencies along with the desired speeds of motion. The experimental results showed that the proposed method improved the velocity-wise accuracy along both the interpolated and extrapolated frequency labels, in addition to a 12.5 % increase in the overall success rate.