 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFast Bilateral Teleoperation and Imitation Learning Using Sensorless Force Control via Accurate Dynamics Model
Jul 08, 2025In recent years, the advancement of imitation learning has led to increased interest in teleoperating low-cost manipulators to collect demonstration data. However, most existing systems rely on unilateral control, which only transmits target position values. While this approach is easy to implement and suitable for slow, non-contact tasks, it struggles with fast or contact-rich operations due to the absence of force feedback. This work demonstrates that fast teleoperation with force feedback is feasible even with force-sensorless, low-cost manipulators by leveraging 4-channel bilateral control. Based on accurately identified manipulator dynamics, our method integrates nonlinear terms compensation, velocity and external force estimation, and variable gain corresponding to inertial variation. Furthermore, using data collected by 4-channel bilateral control, we show that incorporating force information into both the input and output of learned policies improves performance in imitation learning. These results highlight the practical effectiveness of our system for high-fidelity teleoperation and data collection on affordable hardware.
Motion Generation for Food Topping Challenge 2024: Serving Salmon Roe Bowl and Picking Fried Chicken
Apr 30, 2025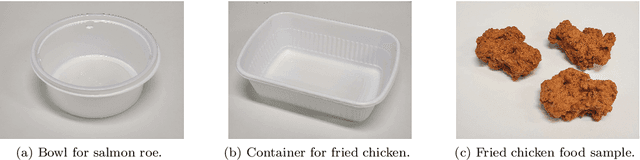
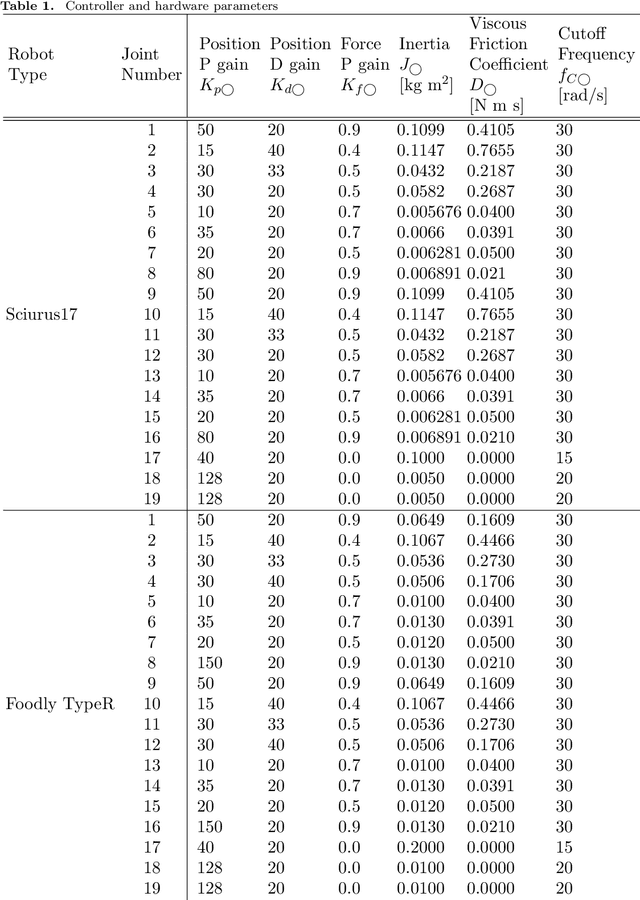
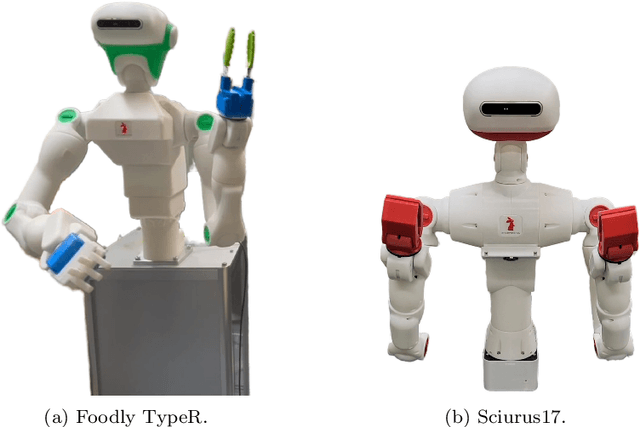

Although robots have been introduced in many industries, food production robots are yet to be widely employed because the food industry requires not only delicate movements to handle food but also complex movements that adapt to the environment. Force control is important for handling delicate objects such as food. In addition, achieving complex movements is possible by making robot motions based on human teachings. Four-channel bilateral control is proposed, which enables the simultaneous teaching of position and force information. Moreover, methods have been developed to reproduce motions obtained through human teachings and generate adaptive motions using learning. We demonstrated the effectiveness of these methods for food handling tasks in the Food Topping Challenge at the 2024 IEEE International Conference on Robotics and Automation (ICRA 2024). For the task of serving salmon roe on rice, we achieved the best performance because of the high reproducibility and quick motion of the proposed method. Further, for the task of picking fried chicken, we successfully picked the most pieces of fried chicken among all participating teams. This paper describes the implementation and performance of these methods.
Error-Feedback Model for Output Correction in Bilateral Control-Based Imitation Learning
Nov 19, 2024In recent years, imitation learning using neural networks has enabled robots to perform flexible tasks. However, since neural networks operate in a feedforward structure, they do not possess a mechanism to compensate for output errors. To address this limitation, we developed a feedback mechanism to correct these errors. By employing a hierarchical structure for neural networks comprising lower and upper layers, the lower layer was controlled to follow the upper layer. Additionally, using a multi-layer perceptron in the lower layer, which lacks an internal state, enhanced the error feedback. In the character-writing task, this model demonstrated improved accuracy in writing previously untrained characters. In the character-writing task, this model demonstrated improved accuracy in writing previously untrained characters. Through autonomous control with error feedback, we confirmed that the lower layer could effectively track the output of the upper layer. This study represents a promising step toward integrating neural networks with control theories.