 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Mean-Zero Disagreement-Regularized Imitation Learning (CMZ-DRIL)
Mar 02, 2024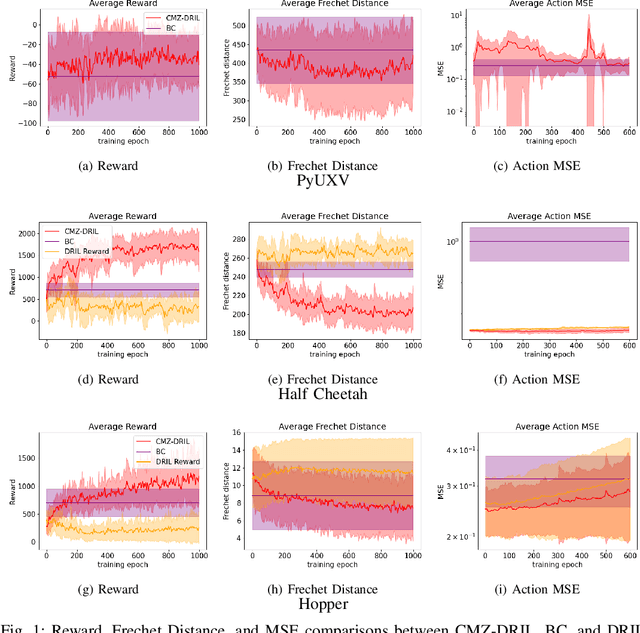
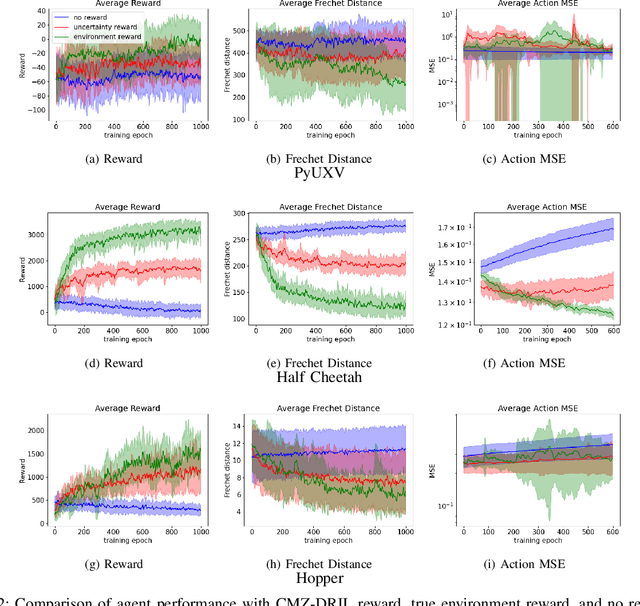

Machine-learning paradigms such as imitation learning and reinforcement learning can generate highly performant agents in a variety of complex environments. However, commonly used methods require large quantities of data and/or a known reward function. This paper presents a method called Continuous Mean-Zero Disagreement-Regularized Imitation Learning (CMZ-DRIL) that employs a novel reward structure to improve the performance of imitation-learning agents that have access to only a handful of expert demonstrations. CMZ-DRIL uses reinforcement learning to minimize uncertainty among an ensemble of agents trained to model the expert demonstrations. This method does not use any environment-specific rewards, but creates a continuous and mean-zero reward function from the action disagreement of the agent ensemble. As demonstrated in a waypoint-navigation environment and in two MuJoCo environments, CMZ-DRIL can generate performant agents that behave more similarly to the expert than primary previous approaches in several key metrics.
Data-efficient operator learning for solving high Mach number fluid flow problems
Dec 04, 2023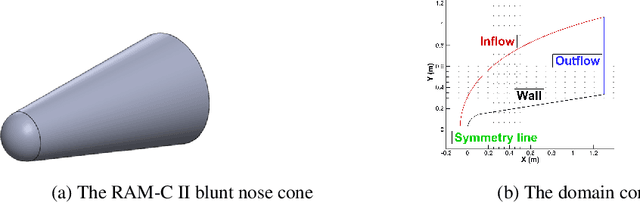
We consider the problem of using SciML to predict solutions of high Mach fluid flows over irregular geometries. In this setting, data is limited, and so it is desirable for models to perform well in the low-data setting. We show that Neural Basis Functions (NBF), which learns a basis of behavior modes from the data and then uses this basis to make predictions, is more effective than a basis-unaware baseline model. In addition, we identify continuing challenges in the space of predicting solutions for this type of problem.
Ensemble models outperform single model uncertainties and predictions for operator-learning of hypersonic flows
Nov 03, 2023
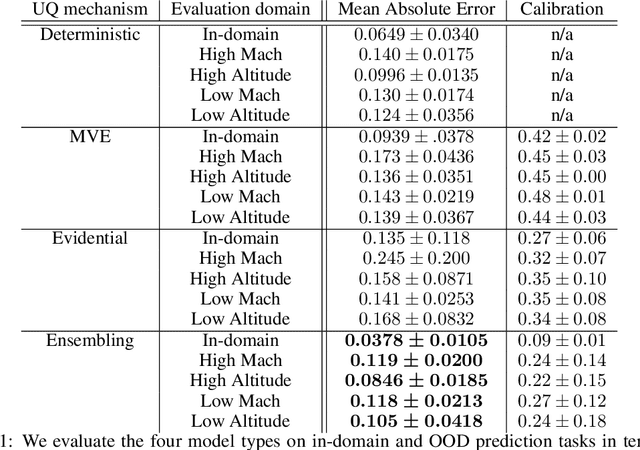
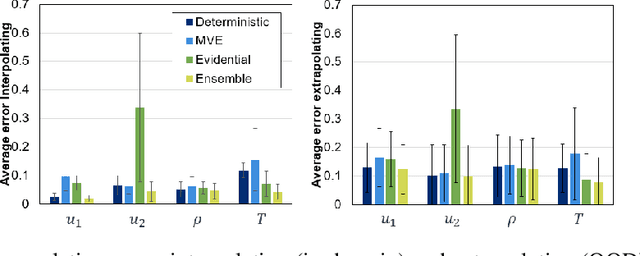
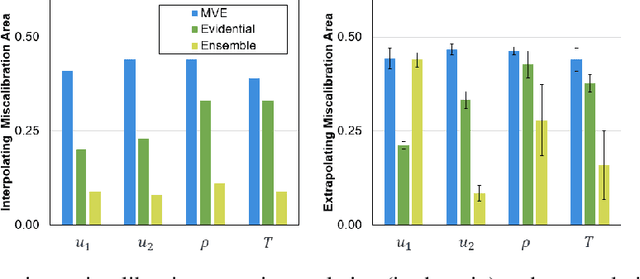
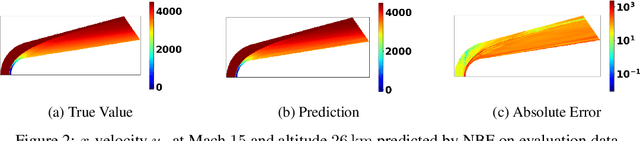
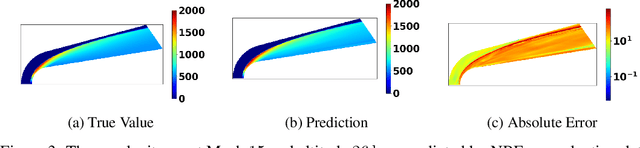
High-fidelity computational simulations and physical experiments of hypersonic flows are resource intensive. Training scientific machine learning (SciML) models on limited high-fidelity data offers one approach to rapidly predict behaviors for situations that have not been seen before. However, high-fidelity data is itself in limited quantity to validate all outputs of the SciML model in unexplored input space. As such, an uncertainty-aware SciML model is desired. The SciML model's output uncertainties could then be used to assess the reliability and confidence of the model's predictions. In this study, we extend a DeepONet using three different uncertainty quantification mechanisms: mean-variance estimation, evidential uncertainty, and ensembling. The uncertainty aware DeepONet models are trained and evaluated on the hypersonic flow around a blunt cone object with data generated via computational fluid dynamics over a wide range of Mach numbers and altitudes. We find that ensembling outperforms the other two uncertainty models in terms of minimizing error and calibrating uncertainty in both interpolative and extrapolative regimes.
Adaptive Neural Networks Using Residual Fitting
Jan 13, 2023Current methods for estimating the required neural-network size for a given problem class have focused on methods that can be computationally intensive, such as neural-architecture search and pruning. In contrast, methods that add capacity to neural networks as needed may provide similar results to architecture search and pruning, but do not require as much computation to find an appropriate network size. Here, we present a network-growth method that searches for explainable error in the network's residuals and grows the network if sufficient error is detected. We demonstrate this method using examples from classification, imitation learning, and reinforcement learning. Within these tasks, the growing network can often achieve better performance than small networks that do not grow, and similar performance to networks that begin much larger.