 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeContinuous Mean-Zero Disagreement-Regularized Imitation Learning (CMZ-DRIL)
Mar 02, 2024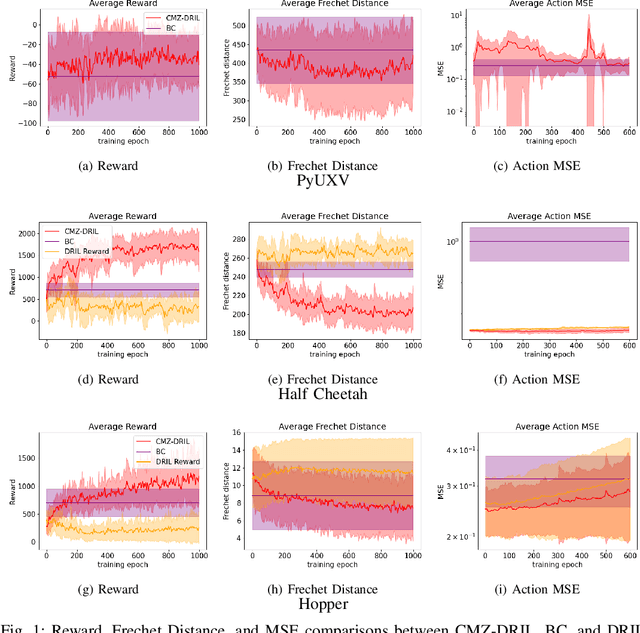
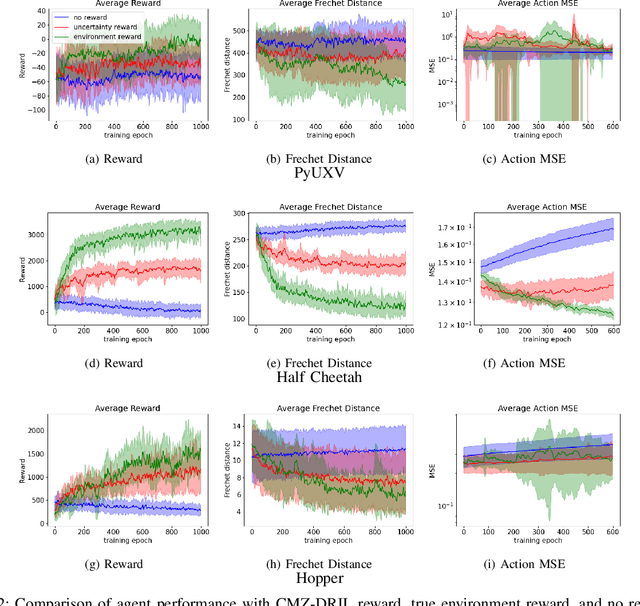

Machine-learning paradigms such as imitation learning and reinforcement learning can generate highly performant agents in a variety of complex environments. However, commonly used methods require large quantities of data and/or a known reward function. This paper presents a method called Continuous Mean-Zero Disagreement-Regularized Imitation Learning (CMZ-DRIL) that employs a novel reward structure to improve the performance of imitation-learning agents that have access to only a handful of expert demonstrations. CMZ-DRIL uses reinforcement learning to minimize uncertainty among an ensemble of agents trained to model the expert demonstrations. This method does not use any environment-specific rewards, but creates a continuous and mean-zero reward function from the action disagreement of the agent ensemble. As demonstrated in a waypoint-navigation environment and in two MuJoCo environments, CMZ-DRIL can generate performant agents that behave more similarly to the expert than primary previous approaches in several key metrics.