 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGovernor: a Reference Generator for Nonlinear Model Predictive Control in Legged Robots
Jul 20, 2022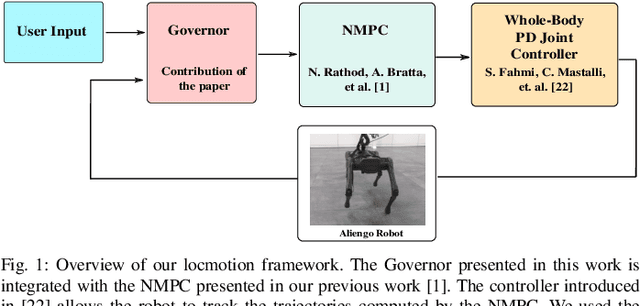
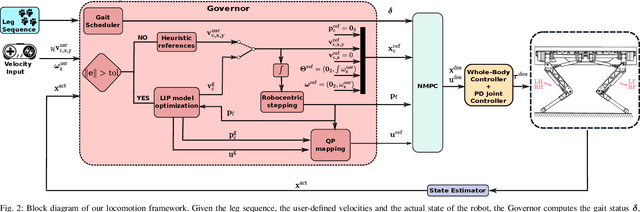
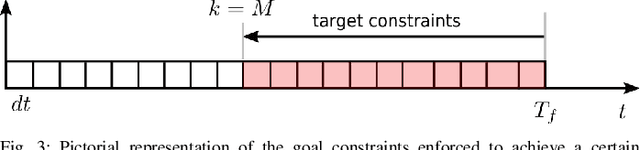
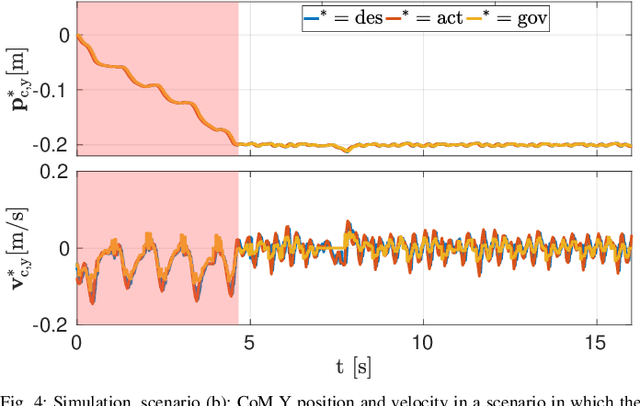
Model Predictive Control (MPC) approaches are widely used in robotics, since they allow to compute updated trajectories while the robot is moving. They generally require heuristic references for the tracking terms and proper tuning of parameters of the cost function in order to obtain good performance. When for example, a legged robot has to react to disturbances from the environment (e.g., recover after a push) or track a certain goal with statically unstable gaits, the effectiveness of the algorithm can degrade. In this work we propose a novel optimization-based Reference Generator, named Governor, which exploits a Linear Inverted Pendulum model to compute reference trajectories for the Center of Mass, while taking into account the possible under-actuation of a gait (e.g. in a trot). The obtained trajectories are used as references for the cost function of the Nonlinear MPC presented in our previous work [1]. We also present a formulation that can guarantee a certain response time to reach a goal, without the need to tune the weights of the cost terms. In addition, foothold locations are corrected to drive the robot towards the goal. We demonstrate the effectiveness of our approach both in simulations and experiments in different scenarios with the Aliengo robot.
Mobility-enhanced MPC for Legged Locomotion on Rough Terrain
May 12, 2021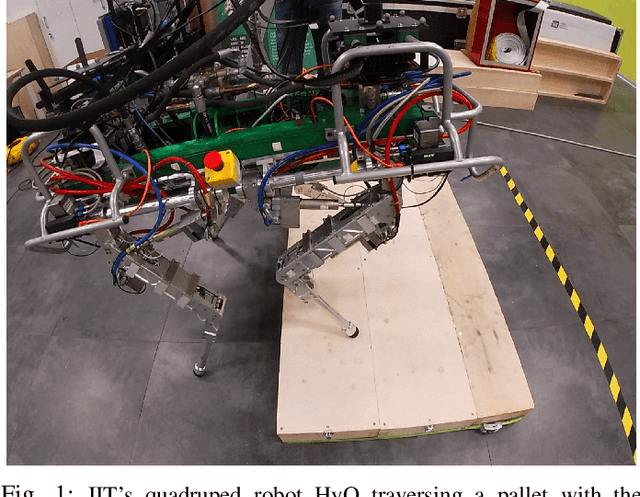
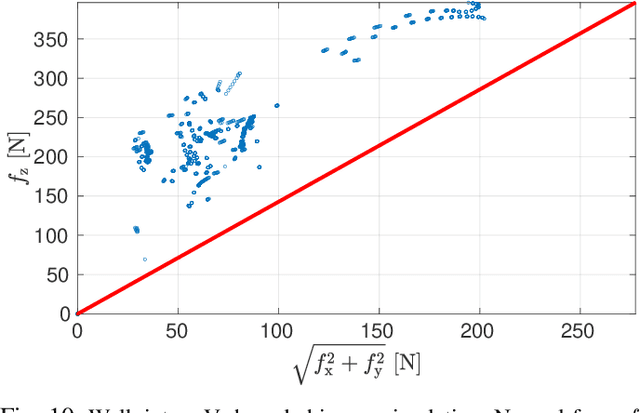
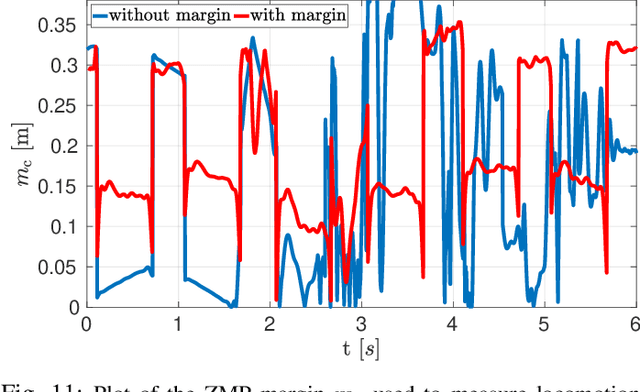

Re-planning in legged locomotion is crucial to track a given set-point while adapting to the terrain and rejecting external disturbances. In this work, we propose a real-time Nonlinear Model Predictive Control (NMPC) tailored to a legged robot for achieving dynamic locomotion on a wide variety of terrains. We introduce a mobility-based criterion to define an NMPC cost that enhances the locomotion of quadruped robots while maximizing leg mobility and staying far from kinematic limits. Our NMPC is based on the real-time iteration scheme that allows us to re-plan online at $25 \, \mathrm{Hz}$ with a time horizon of $2$ seconds. We use the single rigid body dynamic model defined in the center of mass frame that allows to increase the computational efficiency. In simulations, the NMPC is tested to traverse a set of pallets of different sizes, to walk into a V-shaped chimney, and to locomote over rough terrain. We demonstrate the effectiveness of our NMPC with the mobility feature that allowed IIT's $87.4 \,\mathrm{kg}$ quadruped robot HyQ to achieve an omni-directional walk on flat terrain, to traverse a static pallet, and to adapt to a repositioned pallet during a walk in real experiments.