 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGovernor: a Reference Generator for Nonlinear Model Predictive Control in Legged Robots
Paper and Code
Jul 20, 2022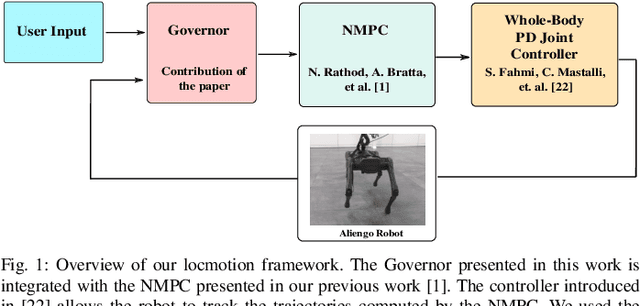
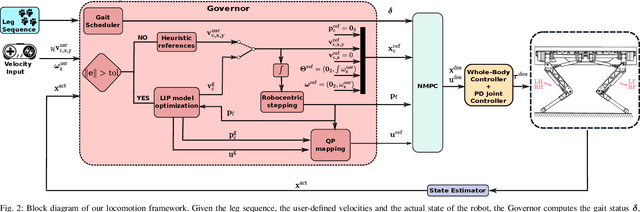
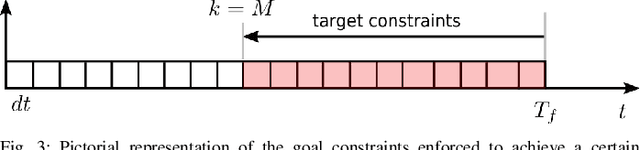
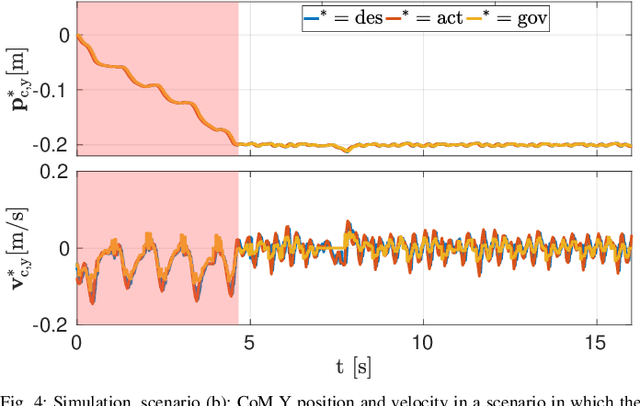
Model Predictive Control (MPC) approaches are widely used in robotics, since they allow to compute updated trajectories while the robot is moving. They generally require heuristic references for the tracking terms and proper tuning of parameters of the cost function in order to obtain good performance. When for example, a legged robot has to react to disturbances from the environment (e.g., recover after a push) or track a certain goal with statically unstable gaits, the effectiveness of the algorithm can degrade. In this work we propose a novel optimization-based Reference Generator, named Governor, which exploits a Linear Inverted Pendulum model to compute reference trajectories for the Center of Mass, while taking into account the possible under-actuation of a gait (e.g. in a trot). The obtained trajectories are used as references for the cost function of the Nonlinear MPC presented in our previous work [1]. We also present a formulation that can guarantee a certain response time to reach a goal, without the need to tune the weights of the cost terms. In addition, foothold locations are corrected to drive the robot towards the goal. We demonstrate the effectiveness of our approach both in simulations and experiments in different scenarios with the Aliengo robot.