 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-World Motion Forecasting
Mar 10, 2026Motion forecasting aims to predict the future trajectories of dynamic agents in the scene, enabling autonomous vehicles to effectively reason about scene evolution. Existing approaches operate under the closed-world regime and assume fixed object taxonomy as well as access to high-quality perception. Therefore, they struggle in real-world settings where perception is imperfect and object taxonomy evolves over time. In this work, we bridge this fundamental gap by introducing open-world motion forecasting, a novel setting in which new object classes are sequentially introduced over time and future object trajectories are estimated directly from camera images. We tackle this setting by proposing the first end-to-end class-incremental motion forecasting framework to mitigate catastrophic forgetting while simultaneously learning to forecast newly introduced classes. When a new class is introduced, our framework employs a pseudo-labeling strategy to first generate motion forecasting pseudo-labels for all known classes which are then processed by a vision-language model to filter inconsistent and over-confident predictions. Parallelly, our approach further mitigates catastrophic forgetting by using a novel replay sampling strategy that leverages query feature variance to sample previous sequences with informative motion patterns. Extensive evaluation on the nuScenes and Argoverse 2 datasets demonstrates that our approach successfully resists catastrophic forgetting and maintains performance on previously learned classes while improving adaptation to novel ones. Further, we demonstrate that our approach supports zero-shot transfer to real-world driving and naturally extends to end-to-end class-incremental planning, enabling continual adaptation of the full autonomous driving system. We provide the code at https://omen.cs.uni-freiburg.de .
Autonomous Vehicles Path Planning under Temporal Logic Specifications
Oct 10, 2024Path planning is an essential component of autonomous driving. A global planner is responsible for the high-level planning. It basically performs a shortest-path search on a known map, thereby defining waypoints used to control the local (low-level) planner. Local planning is a runtime verification method which is repeatedly run on the vehicle itself in real-time, so as to find the optimal short-horizon path which leads to the desired waypoint in a way which is both efficient and safe. The challenge is that the local planner has to take into account repeatedly incoming updates about the information available of the environment. In addition, it performs a complex task, as it has to take into account a large variety of requirements, originating from the necessity of collision avoidance with obstacles, respecting traffic rules, sticking to regulatory requirements, and lastly to reach the next waypoint efficiently. In this paper, we describe a logic-based specification mechanism which fulfills all these requirements.
DynaMoN: Motion-Aware Fast And Robust Camera Localization for Dynamic NeRF
Sep 16, 2023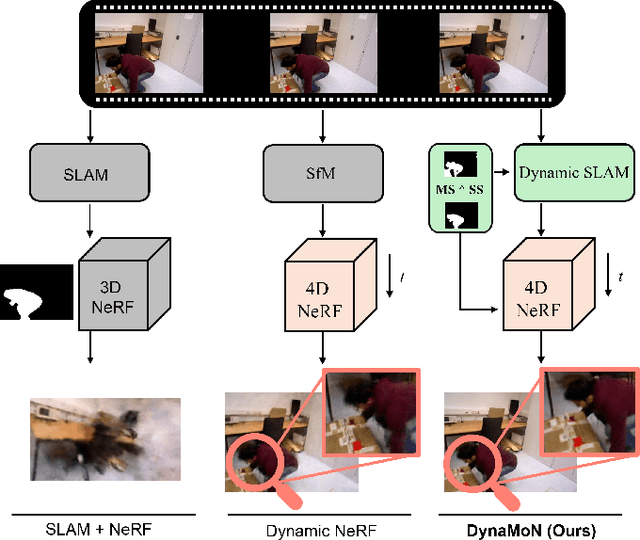

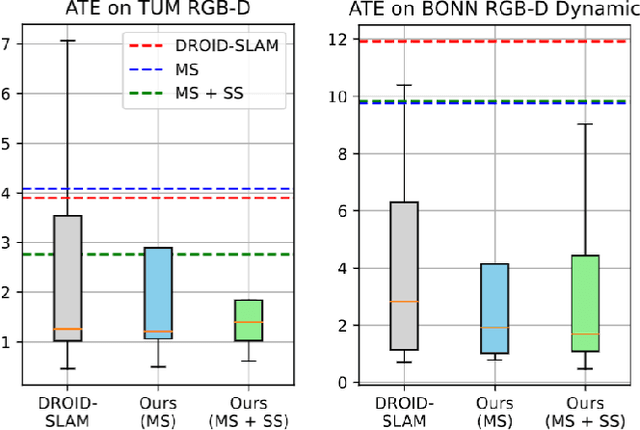

Dynamic reconstruction with neural radiance fields (NeRF) requires accurate camera poses. These are often hard to retrieve with existing structure-from-motion (SfM) pipelines as both camera and scene content can change. We propose DynaMoN that leverages simultaneous localization and mapping (SLAM) jointly with motion masking to handle dynamic scene content. Our robust SLAM-based tracking module significantly accelerates the training process of the dynamic NeRF while improving the quality of synthesized views at the same time. Extensive experimental validation on TUM RGB-D, BONN RGB-D Dynamic and the DyCheck's iPhone dataset, three real-world datasets, shows the advantages of DynaMoN both for camera pose estimation and novel view synthesis.