 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Vehicles Path Planning under Temporal Logic Specifications
Oct 10, 2024Path planning is an essential component of autonomous driving. A global planner is responsible for the high-level planning. It basically performs a shortest-path search on a known map, thereby defining waypoints used to control the local (low-level) planner. Local planning is a runtime verification method which is repeatedly run on the vehicle itself in real-time, so as to find the optimal short-horizon path which leads to the desired waypoint in a way which is both efficient and safe. The challenge is that the local planner has to take into account repeatedly incoming updates about the information available of the environment. In addition, it performs a complex task, as it has to take into account a large variety of requirements, originating from the necessity of collision avoidance with obstacles, respecting traffic rules, sticking to regulatory requirements, and lastly to reach the next waypoint efficiently. In this paper, we describe a logic-based specification mechanism which fulfills all these requirements.
AGNES: Abstraction-guided Framework for Deep Neural Networks Security
Nov 07, 2023Deep Neural Networks (DNNs) are becoming widespread, particularly in safety-critical areas. One prominent application is image recognition in autonomous driving, where the correct classification of objects, such as traffic signs, is essential for safe driving. Unfortunately, DNNs are prone to backdoors, meaning that they concentrate on attributes of the image that should be irrelevant for their correct classification. Backdoors are integrated into a DNN during training, either with malicious intent (such as a manipulated training process, because of which a yellow sticker always leads to a traffic sign being recognised as a stop sign) or unintentional (such as a rural background leading to any traffic sign being recognised as animal crossing, because of biased training data). In this paper, we introduce AGNES, a tool to detect backdoors in DNNs for image recognition. We discuss the principle approach on which AGNES is based. Afterwards, we show that our tool performs better than many state-of-the-art methods for multiple relevant case studies.
Backdoor Mitigation in Deep Neural Networks via Strategic Retraining
Dec 14, 2022Deep Neural Networks (DNN) are becoming increasingly more important in assisted and automated driving. Using such entities which are obtained using machine learning is inevitable: tasks such as recognizing traffic signs cannot be developed reasonably using traditional software development methods. DNN however do have the problem that they are mostly black boxes and therefore hard to understand and debug. One particular problem is that they are prone to hidden backdoors. This means that the DNN misclassifies its input, because it considers properties that should not be decisive for the output. Backdoors may either be introduced by malicious attackers or by inappropriate training. In any case, detecting and removing them is important in the automotive area, as they might lead to safety violations with potentially severe consequences. In this paper, we introduce a novel method to remove backdoors. Our method works for both intentional as well as unintentional backdoors. We also do not require prior knowledge about the shape or distribution of backdoors. Experimental evidence shows that our method performs well on several medium-sized examples.
Optimizing Demonstrated Robot Manipulation Skills for Temporal Logic Constraints
Sep 07, 2022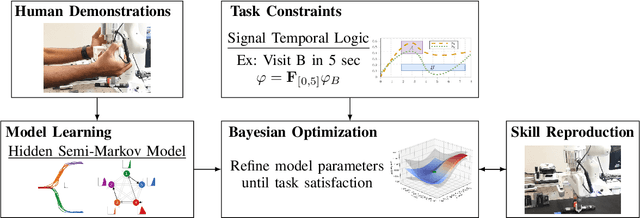

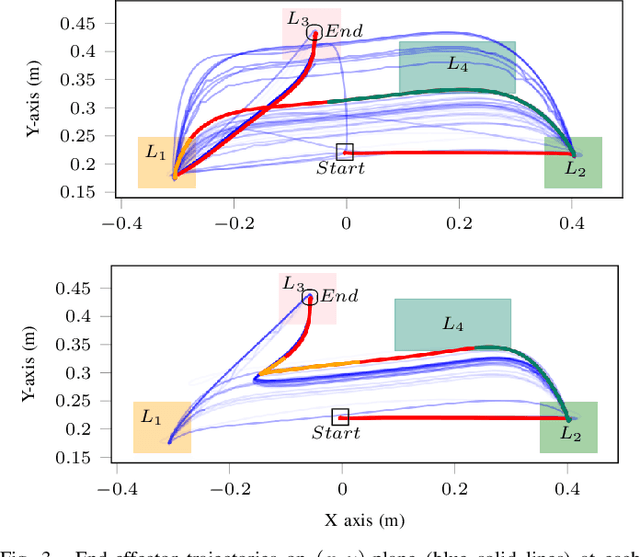

For performing robotic manipulation tasks, the core problem is determining suitable trajectories that fulfill the task requirements. Various approaches to compute such trajectories exist, being learning and optimization the main driving techniques. Our work builds on the learning-from-demonstration (LfD) paradigm, where an expert demonstrates motions, and the robot learns to imitate them. However, expert demonstrations are not sufficient to capture all sorts of task specifications, such as the timing to grasp an object. In this paper, we propose a new method that considers formal task specifications within LfD skills. Precisely, we leverage Signal Temporal Logic (STL), an expressive form of temporal properties of systems, to formulate task specifications and use black-box optimization (BBO) to adapt an LfD skill accordingly. We demonstrate our approach in simulation and on a real industrial setting using several tasks that showcase how our approach addresses the LfD limitations using STL and BBO.
Study of Signal Temporal Logic Robustness Metrics for Robotic Tasks Optimization
Oct 01, 2021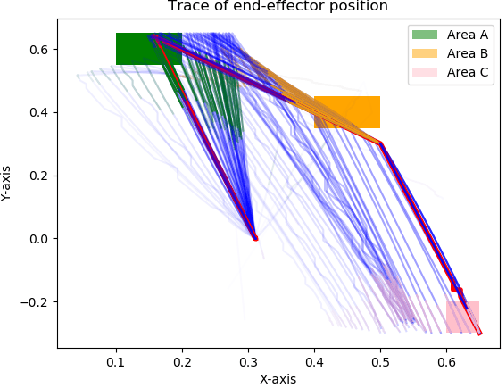
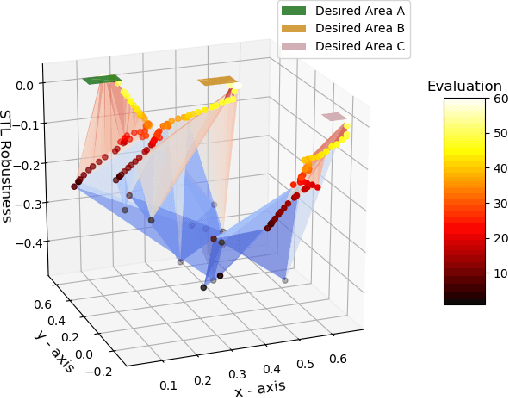

Signal Temporal Logic (STL) is an efficient technique for describing temporal constraints. It can play a significant role in robotic manipulation, for example, to optimize the robot performance according to task-dependent metrics. In this paper, we evaluate several STL robustness metrics of interest in robotic manipulation tasks and discuss a case study showing the advantages of using STL to define complex constraints. Such constraints can be understood as cost functions in task optimization. We show how STL-based cost functions can be optimized using a variety of off-the-shelf optimizers. We report initial results of this research direction on a simulated planar environment.