 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpace Group Equivariant Crystal Diffusion
May 16, 2025Accelerating inverse design of crystalline materials with generative models has significant implications for a range of technologies. Unlike other atomic systems, 3D crystals are invariant to discrete groups of isometries called the space groups. Crucially, these space group symmetries are known to heavily influence materials properties. We propose SGEquiDiff, a crystal generative model which naturally handles space group constraints with space group invariant likelihoods. SGEquiDiff consists of an SE(3)-invariant, telescoping discrete sampler of crystal lattices; permutation-invariant, transformer-based autoregressive sampling of Wyckoff positions, elements, and numbers of symmetrically unique atoms; and space group equivariant diffusion of atomic coordinates. We show that space group equivariant vector fields automatically live in the tangent spaces of the Wyckoff positions. SGEquiDiff achieves state-of-the-art performance on standard benchmark datasets as assessed by quantitative proxy metrics and quantum mechanical calculations.
Graph Neural Networks Gone Hogwild
Jun 29, 2024Message passing graph neural networks (GNNs) would appear to be powerful tools to learn distributed algorithms via gradient descent, but generate catastrophically incorrect predictions when nodes update asynchronously during inference. This failure under asynchrony effectively excludes these architectures from many potential applications, such as learning local communication policies between resource-constrained agents in, e.g., robotic swarms or sensor networks. In this work we explore why this failure occurs in common GNN architectures, and identify "implicitly-defined" GNNs as a class of architectures which is provably robust to partially asynchronous "hogwild" inference, adapting convergence guarantees from work in asynchronous and distributed optimization, e.g., Bertsekas (1982); Niu et al. (2011). We then propose a novel implicitly-defined GNN architecture, which we call an energy GNN. We show that this architecture outperforms other GNNs from this class on a variety of synthetic tasks inspired by multi-agent systems, and achieves competitive performance on real-world datasets.
Vitruvion: A Generative Model of Parametric CAD Sketches
Sep 29, 2021
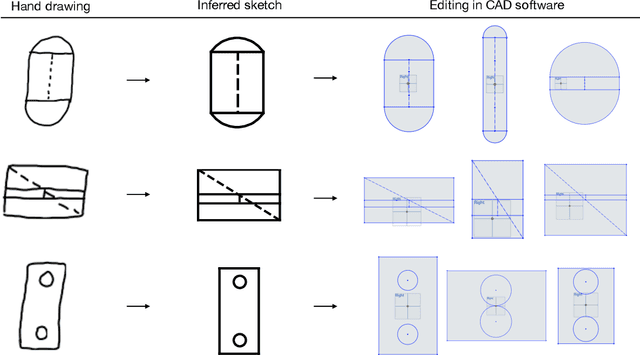
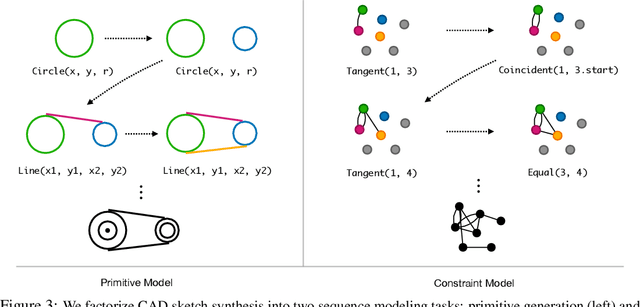
Parametric computer-aided design (CAD) tools are the predominant way that engineers specify physical structures, from bicycle pedals to airplanes to printed circuit boards. The key characteristic of parametric CAD is that design intent is encoded not only via geometric primitives, but also by parameterized constraints between the elements. This relational specification can be viewed as the construction of a constraint program, allowing edits to coherently propagate to other parts of the design. Machine learning offers the intriguing possibility of accelerating the design process via generative modeling of these structures, enabling new tools such as autocompletion, constraint inference, and conditional synthesis. In this work, we present such an approach to generative modeling of parametric CAD sketches, which constitute the basic computational building blocks of modern mechanical design. Our model, trained on real-world designs from the SketchGraphs dataset, autoregressively synthesizes sketches as sequences of primitives, with initial coordinates, and constraints that reference back to the sampled primitives. As samples from the model match the constraint graph representation used in standard CAD software, they may be directly imported, solved, and edited according to downstream design tasks. In addition, we condition the model on various contexts, including partial sketches (primers) and images of hand-drawn sketches. Evaluation of the proposed approach demonstrates its ability to synthesize realistic CAD sketches and its potential to aid the mechanical design workflow.