 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProximal algorithms for large-scale statistical modeling and optimal sensor/actuator selection
Jul 04, 2018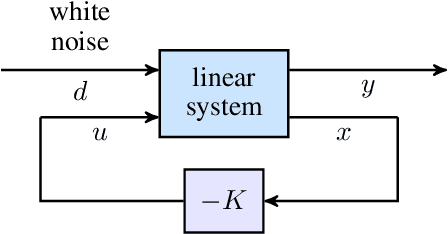
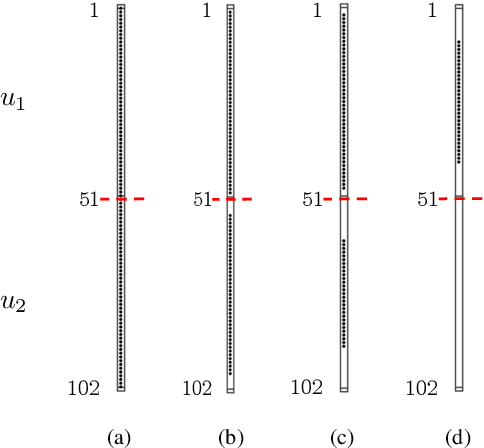
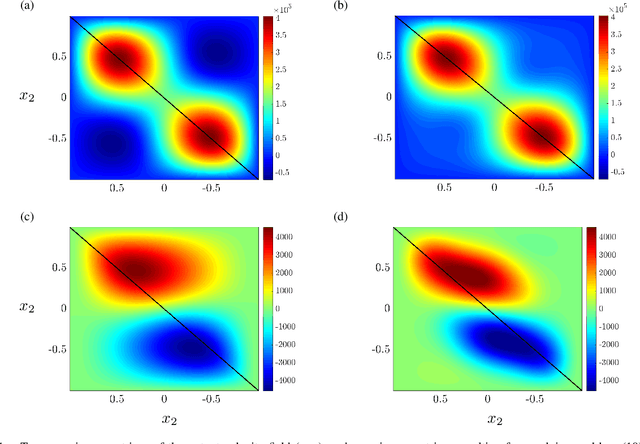
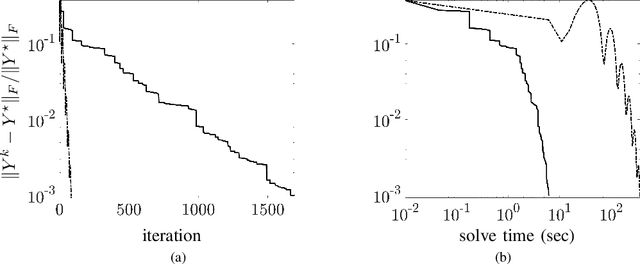
Several problems in modeling and control of stochastically-driven dynamical systems can be cast as regularized semi-definite programs. We examine two such representative problems and show that they can be formulated in a similar manner. The first, in statistical modeling, seeks to reconcile observed statistics by suitably and minimally perturbing prior dynamics. The second, seeks to optimally select sensors and actuators for control purposes. To address modeling and control of large-scale systems we develop a unified algorithmic framework using proximal methods. Our customized algorithms exploit problem structure and allow handling statistical modeling, as well as sensor and actuator selection, for substantially larger scales than what is amenable to current general-purpose solvers.
A second order primal-dual method for nonsmooth convex composite optimization
Sep 05, 2017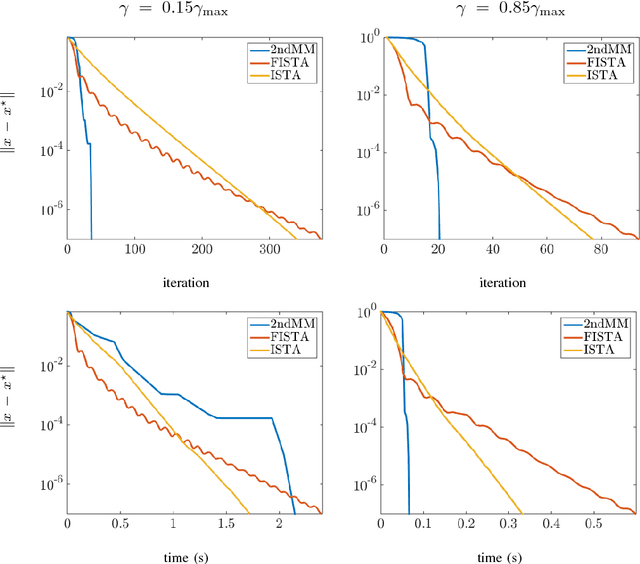
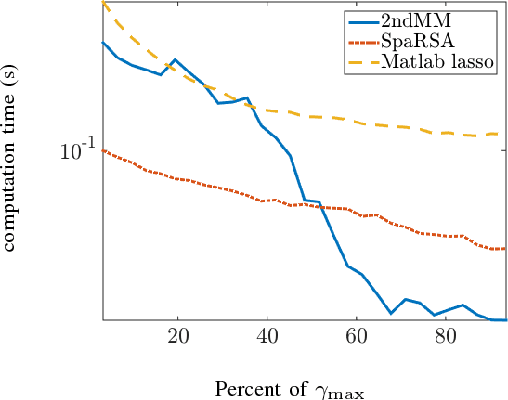
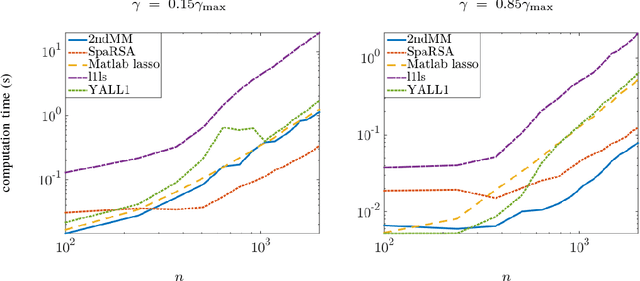
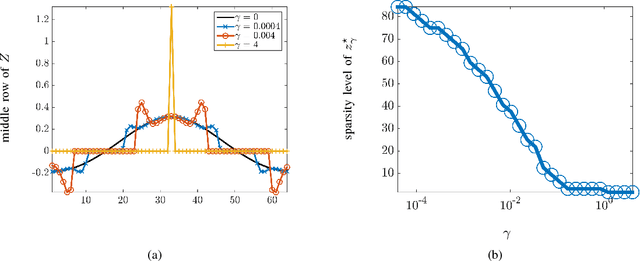
We develop a second order primal-dual method for optimization problems in which the objective function is given by the sum of a strongly convex twice differentiable term and a possibly nondifferentiable convex regularizer. After introducing an auxiliary variable, we utilize the proximal operator of the nonsmooth regularizer to transform the associated augmented Lagrangian into a function that is once, but not twice, continuously differentiable. The saddle point of this function corresponds to the solution of the original optimization problem. We employ a generalization of the Hessian to define second order updates on this function and prove global exponential stability of the corresponding differential inclusion. Furthermore, we develop a globally convergent customized algorithm that utilizes the primal-dual augmented Lagrangian as a merit function. We show that the search direction can be computed efficiently and prove quadratic/superlinear asymptotic convergence. We use the $\ell_1$-regularized least squares problem and the problem of designing a distributed controller for a spatially-invariant system to demonstrate the merits and the effectiveness of our method.