 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAINS: Affordable Indoor Navigation Solution via Line Color Identification Using Mono-Camera for Autonomous Vehicles
Feb 07, 2024



Recently, researchers have been exploring various ways to improve the effectiveness and efficiency of autonomous vehicles by researching new methods, especially for indoor scenarios. Autonomous Vehicles in indoor navigation systems possess many challenges especially the limited accuracy of GPS in indoor scenarios. Several, robust methods have been explored for autonomous vehicles in indoor scenarios to solve this problem, but the ineffectiveness of the proposed methods is the high deployment cost. To address the above-mentioned problems we have presented A low-cost indoor navigation method for autonomous vehicles called Affordable Indoor Navigation Solution (AINS) which is based on based on Monocular Camera. Our proposed solution is mainly based on a mono camera without relying on various huge or power-inefficient sensors to find the path, such as range finders and other navigation sensors. Our proposed method shows that we can deploy autonomous vehicles indoor navigation systems while taking into consideration the cost. We can observe that the results shown by our solution are better than existing solutions and we can reduce the estimated error and time consumption.
Lightweight Attribute Localizing Models for Pedestrian Attribute Recognition
Jun 16, 2023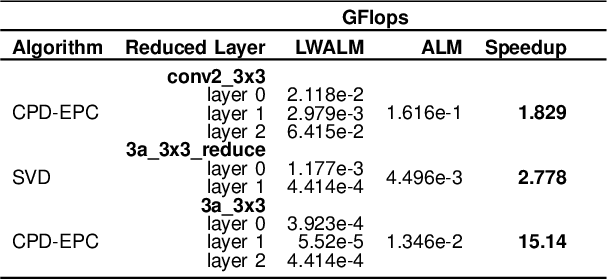
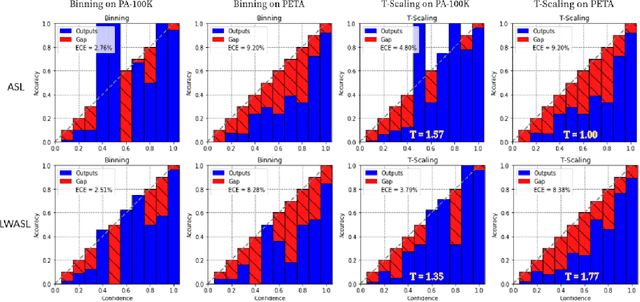
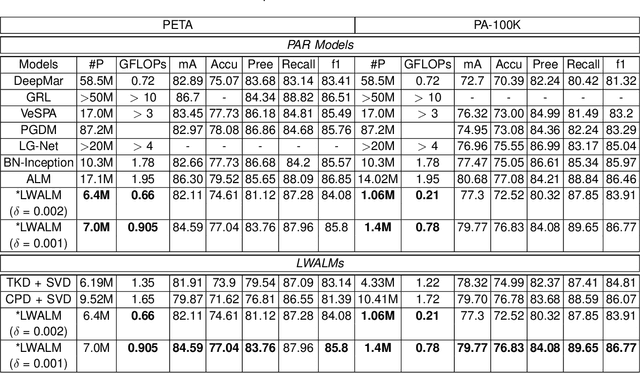
Pedestrian Attribute Recognition (PAR) deals with the problem of identifying features in a pedestrian image. It has found interesting applications in person retrieval, suspect re-identification and soft biometrics. In the past few years, several Deep Neural Networks (DNNs) have been designed to solve the task; however, the developed DNNs predominantly suffer from over-parameterization and high computational complexity. These problems hinder them from being exploited in resource-constrained embedded devices with limited memory and computational capacity. By reducing a network's layers using effective compression techniques, such as tensor decomposition, neural network compression is an effective method to tackle these problems. We propose novel Lightweight Attribute Localizing Models (LWALM) for Pedestrian Attribute Recognition (PAR). LWALM is a compressed neural network obtained after effective layer-wise compression of the Attribute Localization Model (ALM) using the Canonical Polyadic Decomposition with Error Preserving Correction (CPD-EPC) algorithm.
Augmenting Character Designers Creativity Using Generative Adversarial Networks
May 28, 2023



Recent advances in Generative Adversarial Networks (GANs) continue to attract the attention of researchers in different fields due to the wide range of applications devised to take advantage of their key features. Most recent GANs are focused on realism, however, generating hyper-realistic output is not a priority for some domains, as in the case of this work. The generated outcomes are used here as cognitive components to augment character designers creativity while conceptualizing new characters for different multimedia projects. To select the best-suited GANs for such a creative context, we first present a comparison between different GAN architectures and their performance when trained from scratch on a new visual characters dataset using a single Graphics Processing Unit. We also explore alternative techniques, such as transfer learning and data augmentation, to overcome computational resource limitations, a challenge faced by many researchers in the domain. Additionally, mixed methods are used to evaluate the cognitive value of the generated visuals on character designers agency conceptualizing new characters. The results discussed proved highly effective for this context, as demonstrated by early adaptations to the characters design process. As an extension for this work, the presented approach will be further evaluated as a novel co-design process between humans and machines to investigate where and how the generated concepts are interacting with and influencing the design process outcome.
* 18 pages