 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePosterior Re-calibration for Imbalanced Datasets
Oct 22, 2020

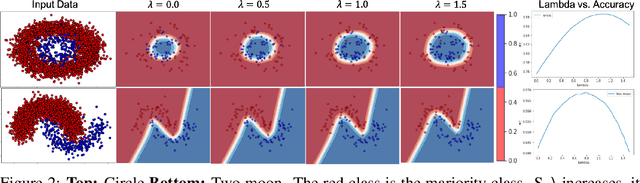

Neural Networks can perform poorly when the training label distribution is heavily imbalanced, as well as when the testing data differs from the training distribution. In order to deal with shift in the testing label distribution, which imbalance causes, we motivate the problem from the perspective of an optimal Bayes classifier and derive a post-training prior rebalancing technique that can be solved through a KL-divergence based optimization. This method allows a flexible post-training hyper-parameter to be efficiently tuned on a validation set and effectively modify the classifier margin to deal with this imbalance. We further combine this method with existing likelihood shift methods, re-interpreting them from the same Bayesian perspective, and demonstrating that our method can deal with both problems in a unified way. The resulting algorithm can be conveniently used on probabilistic classification problems agnostic to underlying architectures. Our results on six different datasets and five different architectures show state of art accuracy, including on large-scale imbalanced datasets such as iNaturalist for classification and Synthia for semantic segmentation. Please see https://github.com/GT-RIPL/UNO-IC.git for implementation.
Who2com: Collaborative Perception via Learnable Handshake Communication
Mar 21, 2020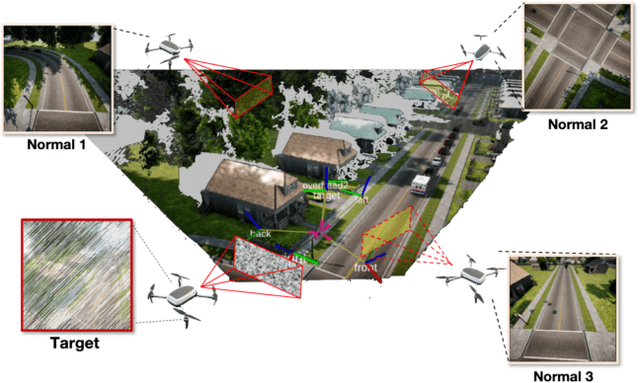
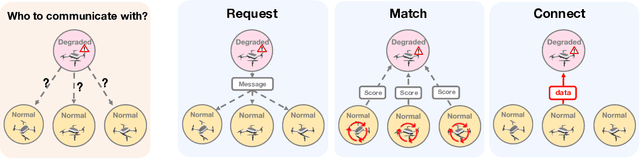
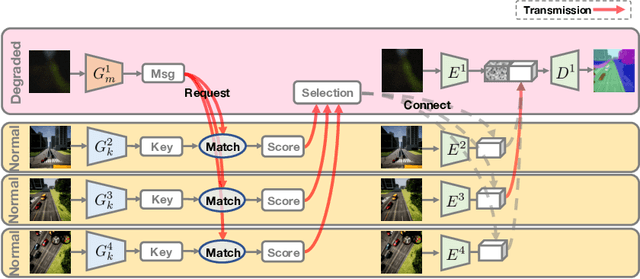
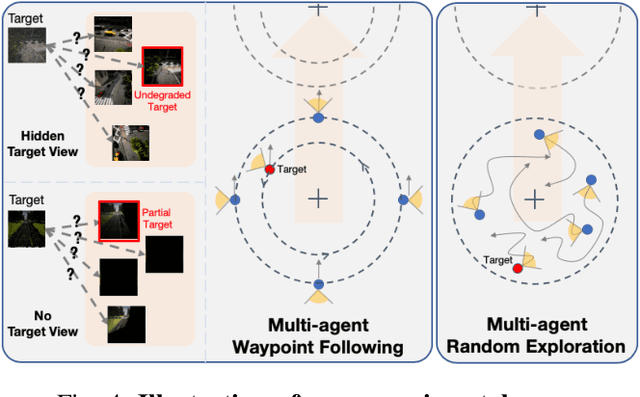
In this paper, we propose the problem of collaborative perception, where robots can combine their local observations with those of neighboring agents in a learnable way to improve accuracy on a perception task. Unlike existing work in robotics and multi-agent reinforcement learning, we formulate the problem as one where learned information must be shared across a set of agents in a bandwidth-sensitive manner to optimize for scene understanding tasks such as semantic segmentation. Inspired by networking communication protocols, we propose a multi-stage handshake communication mechanism where the neural network can learn to compress relevant information needed for each stage. Specifically, a target agent with degraded sensor data sends a compressed request, the other agents respond with matching scores, and the target agent determines who to connect with (i.e., receive information from). We additionally develop the AirSim-CP dataset and metrics based on the AirSim simulator where a group of aerial robots perceive diverse landscapes, such as roads, grasslands, buildings, etc. We show that for the semantic segmentation task, our handshake communication method significantly improves accuracy by approximately 20% over decentralized baselines, and is comparable to centralized ones using a quarter of the bandwidth.
UNO: Uncertainty-aware Noisy-Or Multimodal Fusion for Unanticipated Input Degradation
Nov 06, 2019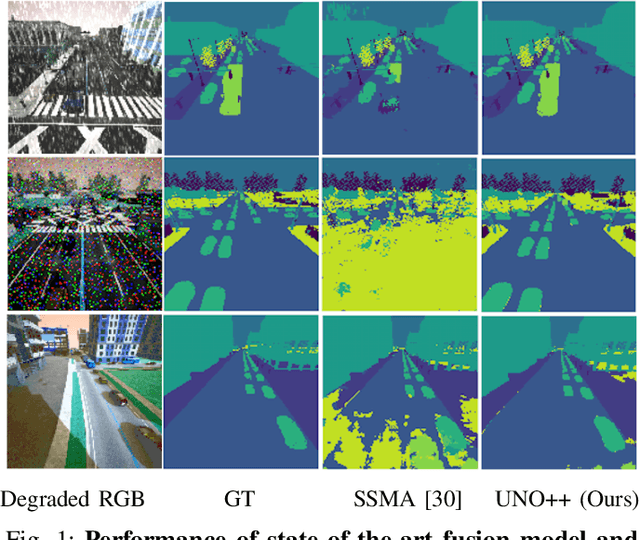

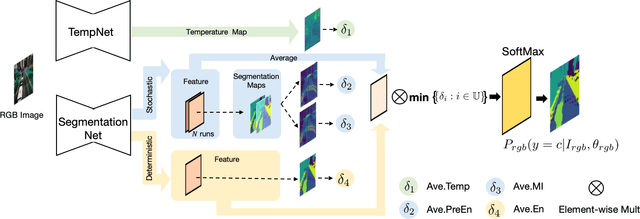
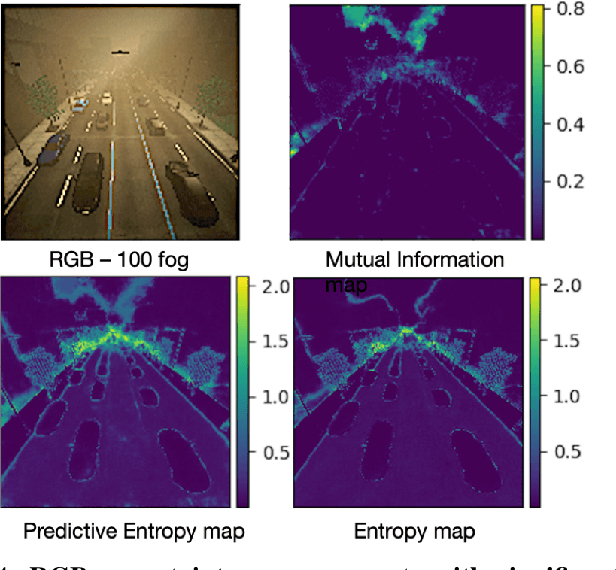
The fusion of multiple sensor modalities, especially through deep learning architectures, has been an active area of study. However, an under-explored aspect of such work is whether the methods can be robust to degradations across their input modalities, especially when they must generalize to degradations not seen during training. In this work, we propose an uncertainty-aware fusion scheme to effectively fuse inputs that might suffer from a range of known and unknown degradations. Specifically, we analyze a number of uncertainty measures, each of which captures a different aspect of uncertainty, and we propose a novel way to fuse degraded inputs by scaling modality-specific output softmax probabilities. We additionally propose a novel data-dependent spatial temperature scaling method to complement these existing uncertainty measures. Finally, we integrate the uncertainty-scaled output from each modality using a probabilistic noisy-or fusion method. In a photo-realistic simulation environment (AirSim), we show that our method achieves significantly better results on a semantic segmentation task, compared to state-of-art fusion architectures, on a range of degradations (e.g. fog, snow, frost, and various other types of noise), some of which are unknown during training. We specifically improve upon the state-of-art[1] by 28% in mean IoU on various degradations. [1] Abhinav Valada, Rohit Mohan, and Wolfram Burgard. Self-Supervised Model Adaptation for Multimodal Semantic Segmentation. In: arXiv e-prints, arXiv:1808.03833 (Aug. 2018), arXiv:1808.03833. arXiv: 1808.03833 [cs.CV].