 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBird-Area Water-Bodies Dataset and Predictive AI Model for Avian Botulism Outbreak
May 03, 2021
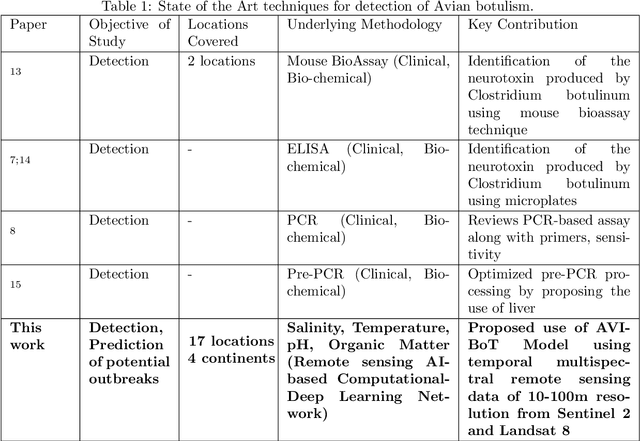
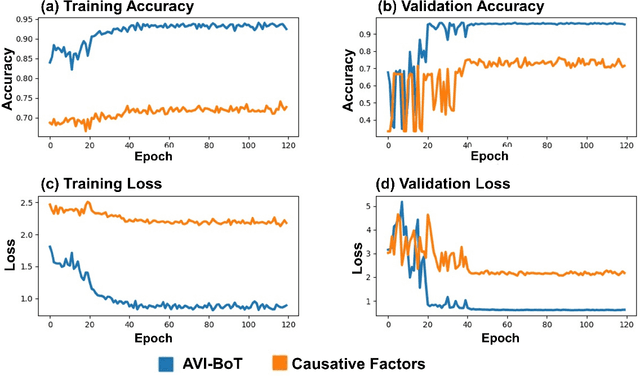
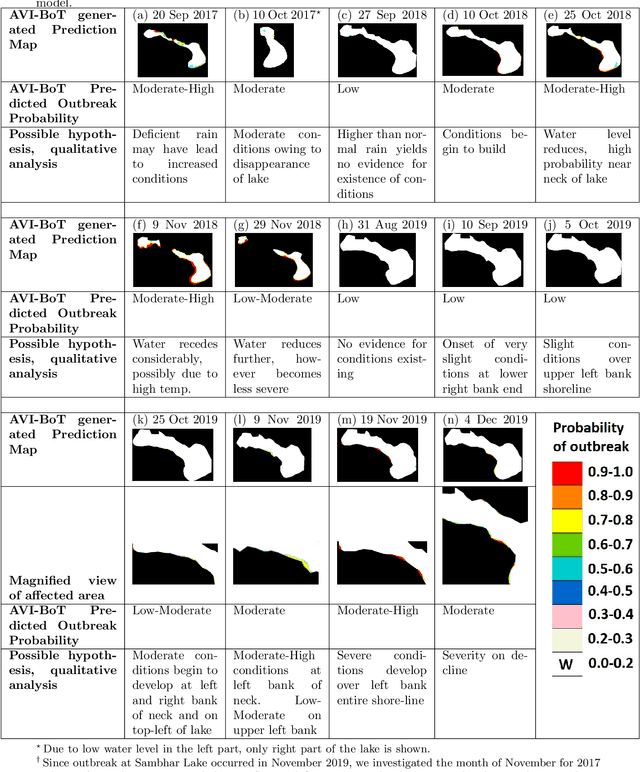
Avian botulism caused by a bacterium, Clostridium botulinum, causes a paralytic disease in birds often leading to high fatality, and is usually diagnosed using molecular techniques. Diagnostic techniques for Avian botulism include: Mouse Bioassay, ELISA, PCR, all of which are time-consuming, laborious and require invasive sample collection from affected sites. In this study, we build a first-ever multi-spectral, remote-sensing imagery based global Bird-Area Water-bodies Dataset (BAWD) (i.e. fused satellite images of water-body sites important for avian fauna) backed by on-ground reporting evidence of outbreaks. In the current version, BAWD covers a total ground area of 904 sq.km from two open source satellite projects (Sentinel and Landsat). BAWD consists of 17 topographically diverse global sites spanning across 4 continents, with locations monitored over a time-span of 3 years (2016-2020). Using BAWD and state-of-the-art deep-learning techniques we propose a first-ever Artificial Intelligence based (AI) model to predict potential outbreak of Avian botulism called AVI-BoT (Aerosol, Visible, Infra-red (NIR/SWIR) and Bands of Thermal). AVI-BoT uses fused multi-spectral satellite images of water-bodies (10-bands) as input to generate a spatial prediction map depicting probability of potential Avian botulism outbreaks. We also train and investigate a simpler (5-band) Causative-Factor model (based on prominent physiological factors reported in literature as conducive for outbreak) to predict Avian botulism. Using AVI-BoT, we achieve a training accuracy of 0.94 and validation accuracy of 0.96 on BAWD, far superior in comparison to our Causative factors model. The proposed technique presents a scale-able, low-cost, non-invasive methodology for continuous monitoring of bird-habitats against botulism outbreaks with the potential of saving valuable fauna lives.
Exploration of Optimized Semantic Segmentation Architectures for edge-Deployment on Drones
Jul 06, 2020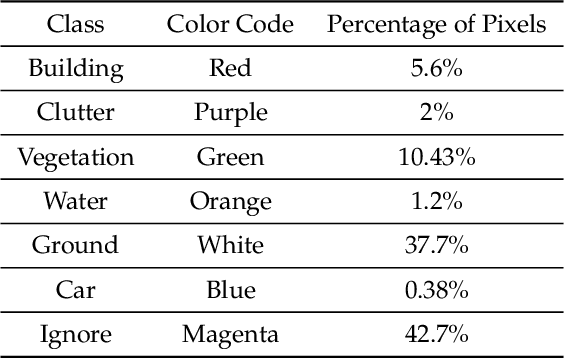
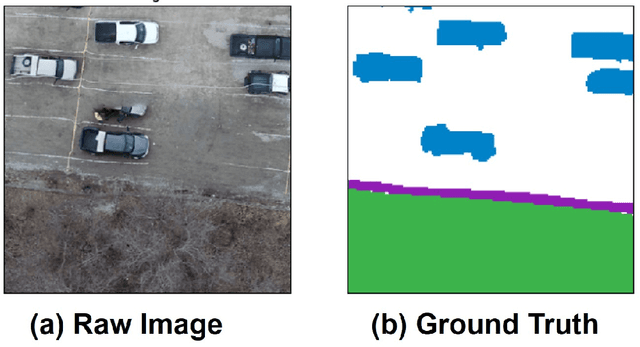
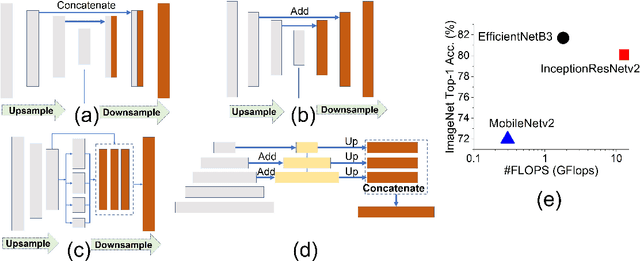
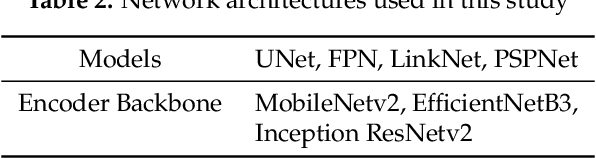
In this paper, we present an analysis on the impact of network parameters for semantic segmentation architectures in context of UAV data processing. We present the analysis on the DroneDeploy Segmentation benchmark. Based on the comparative analysis we identify the optimal network architecture to be FPN-EfficientNetB3 with pretrained encoder backbones based on Imagenet Dataset. The network achieves IoU score of 0.65 and F1-score of 0.71 over the validation dataset. We also compare the various architectures in terms of their memory footprint and inference latency with further exploration of the impact of TensorRT based optimizations. We achieve memory savings of ~4.1x and latency improvement of 10% compared to Model: FPN and Backbone: InceptionResnetV2.