 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-inspired Grasping Strategies of Fresh Fruits and Vegetables Applied to Robotic Manipulation
Oct 30, 2024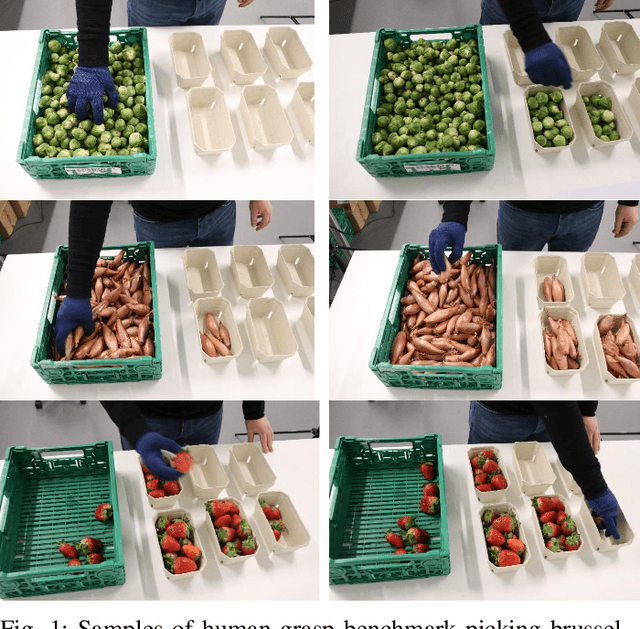
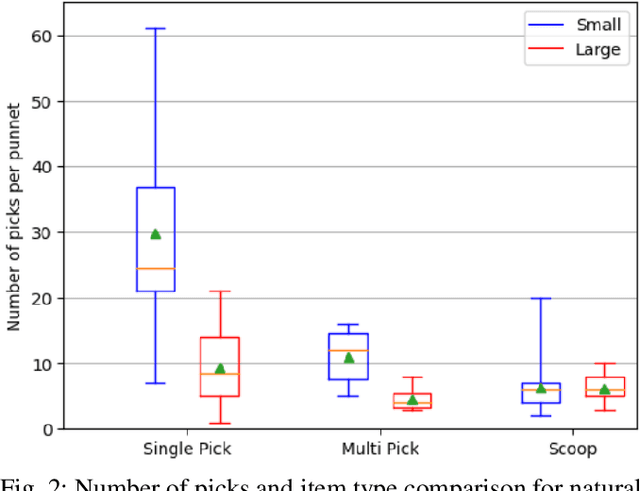
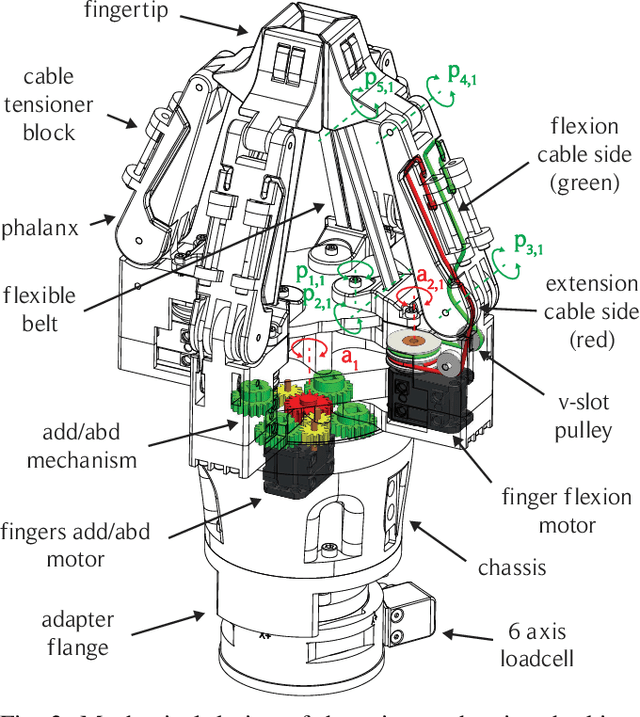
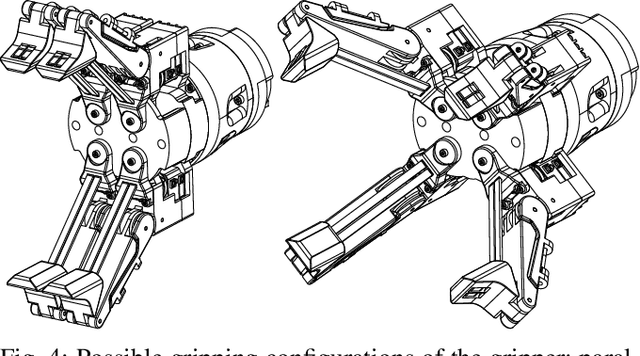
Robotic manipulation of fresh fruits and vegetables, including the grasping of multiple loose items, has a strong industrial need but it still is a challenging task for robotic manipulation. This paper outlines the distinctive manipulation strategies used by humans to pick loose fruits and vegetables with the aim to better adopt them for robotic manipulation of diverse items. In this work we present a first version of a robotic setup designed to pick different single or multiple fresh items, featuring multi-fingered compliant robotic gripper. We analyse human grasping strategies from the perspective of industrial Key Performance Indicators (KPIs) used in the logistic sector. The robotic system was validated using the same KPIs, as well as taking into account human performance and strategies. This paper lays the foundation for future development of the robotic demonstrator for fresh fruit and vegetable intelligent manipulation, and outlines the need for generic approaches to handle the complexity of the task.
* *Authors contributed equally
Enhancing AUV Autonomy With Model Predictive Path Integral Control
Aug 10, 2023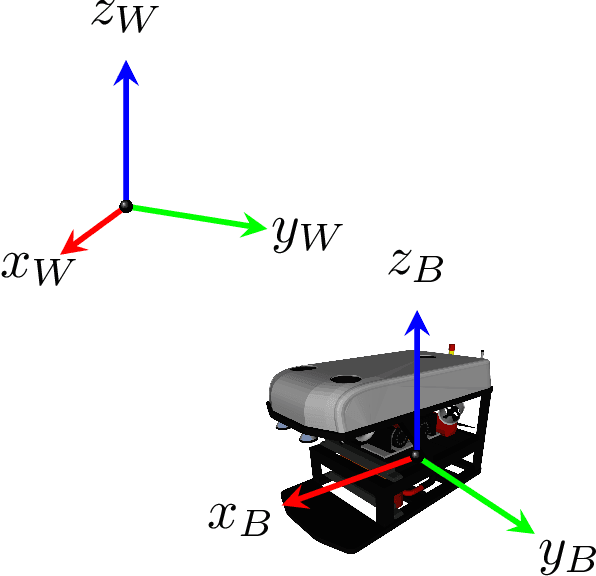
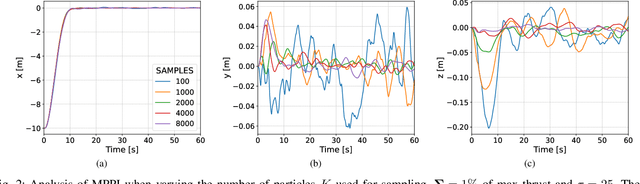
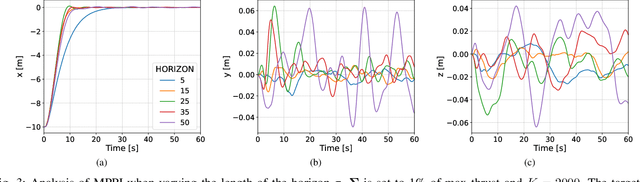
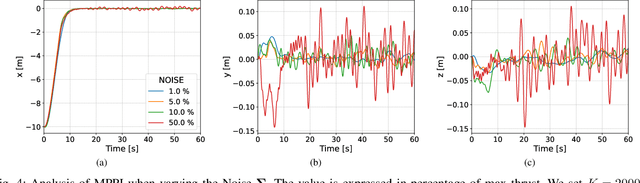
Autonomous underwater vehicles (AUVs) play a crucial role in surveying marine environments, carrying out underwater inspection tasks, and ocean exploration. However, in order to ensure that the AUV is able to carry out its mission successfully, a control system capable of adapting to changing environmental conditions is required. Furthermore, to ensure the robotic platform's safe operation, the onboard controller should be able to operate under certain constraints. In this work, we investigate the feasibility of Model Predictive Path Integral Control (MPPI) for the control of an AUV. We utilise a non-linear model of the AUV to propagate the samples of the MPPI, which allow us to compute the control action in real time. We provide a detailed evaluation of the effect of the main hyperparameters on the performance of the MPPI controller. Furthermore, we compared the performance of the proposed method with a classical PID and Cascade PID approach, demonstrating the superiority of our proposed controller. Finally, we present results where environmental constraints are added and show how MPPI can handle them by simply incorporating those constraints in the cost function.