 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing AUV Autonomy With Model Predictive Path Integral Control
Aug 10, 2023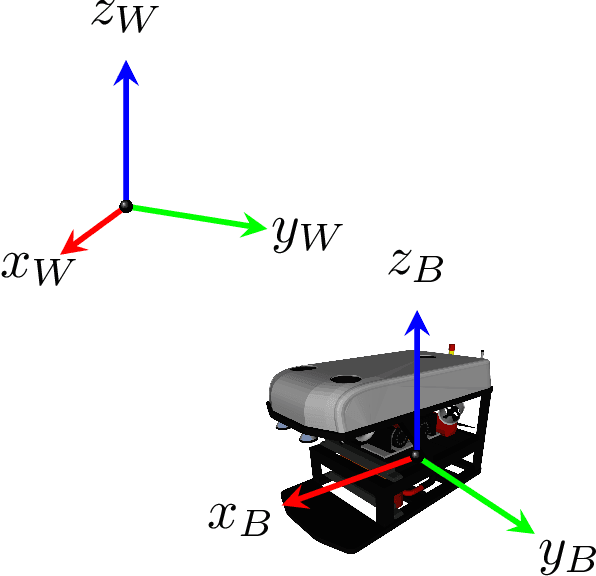
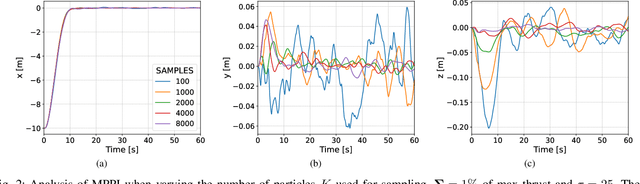
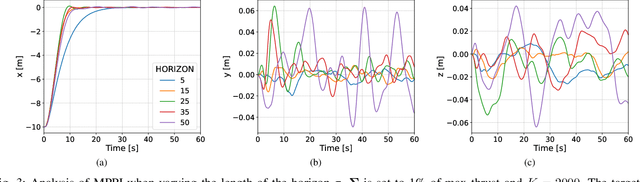
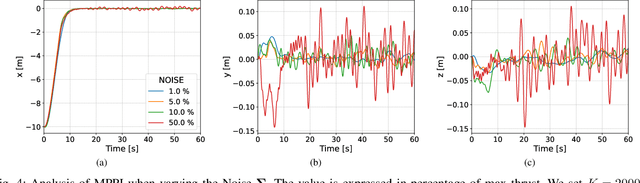
Autonomous underwater vehicles (AUVs) play a crucial role in surveying marine environments, carrying out underwater inspection tasks, and ocean exploration. However, in order to ensure that the AUV is able to carry out its mission successfully, a control system capable of adapting to changing environmental conditions is required. Furthermore, to ensure the robotic platform's safe operation, the onboard controller should be able to operate under certain constraints. In this work, we investigate the feasibility of Model Predictive Path Integral Control (MPPI) for the control of an AUV. We utilise a non-linear model of the AUV to propagate the samples of the MPPI, which allow us to compute the control action in real time. We provide a detailed evaluation of the effect of the main hyperparameters on the performance of the MPPI controller. Furthermore, we compared the performance of the proposed method with a classical PID and Cascade PID approach, demonstrating the superiority of our proposed controller. Finally, we present results where environmental constraints are added and show how MPPI can handle them by simply incorporating those constraints in the cost function.
Test Framework for a Virtual Competition Testbed
Jul 01, 2021
Virtual environments have been utilised in robotics research as a tool to assess systems before deploying them in the field. The COVID-19 pandemic has brought about additional motivation for the development of virtual benchmarks in order to aid in safe and productive development. In-person robotics competitions have also halted, thus limiting the scope of opportunities for students and researchers. We implemented the structure of a service robotics competition into an extendable and adaptable virtual scoring environment. The competition challenges the state of the art in home service robotics by presenting realistic household tasks for robots to complete. The virtual environment provides a foundation for competition teams to assess their systems when accessing the physical environment is not possible. We believe that utilising virtual environments as a means of assessment will lead to other benefits such as increased access and generalisation.