 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHuman-inspired Grasping Strategies of Fresh Fruits and Vegetables Applied to Robotic Manipulation
Paper and Code
Oct 30, 2024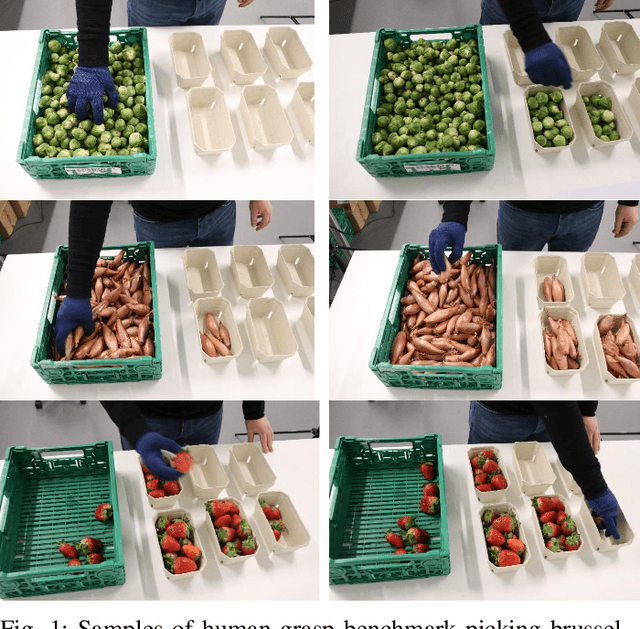
Robotic manipulation of fresh fruits and vegetables, including the grasping of multiple loose items, has a strong industrial need but it still is a challenging task for robotic manipulation. This paper outlines the distinctive manipulation strategies used by humans to pick loose fruits and vegetables with the aim to better adopt them for robotic manipulation of diverse items. In this work we present a first version of a robotic setup designed to pick different single or multiple fresh items, featuring multi-fingered compliant robotic gripper. We analyse human grasping strategies from the perspective of industrial Key Performance Indicators (KPIs) used in the logistic sector. The robotic system was validated using the same KPIs, as well as taking into account human performance and strategies. This paper lays the foundation for future development of the robotic demonstrator for fresh fruit and vegetable intelligent manipulation, and outlines the need for generic approaches to handle the complexity of the task.