 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOCR-RTPS: An OCR-based real-time positioning system for the valet parking
Dec 08, 2022Obtaining the position of ego-vehicle is a crucial prerequisite for automatic control and path planning in the field of autonomous driving. Most existing positioning systems rely on GPS, RTK, or wireless signals, which are arduous to provide effective localization under weak signal conditions. This paper proposes a real-time positioning system based on the detection of the parking numbers as they are unique positioning marks in the parking lot scene. It does not only can help with the positioning with open area, but also run independently under isolation environment. The result tested on both public datasets and self-collected dataset show that the system outperforms others in both performances and applies in practice. In addition, the code and dataset will release later.
* 25 pages, 9 figures
Disentangling and Vectorization: A 3D Visual Perception Approach for Autonomous Driving Based on Surround-View Fisheye Cameras
Jul 19, 2021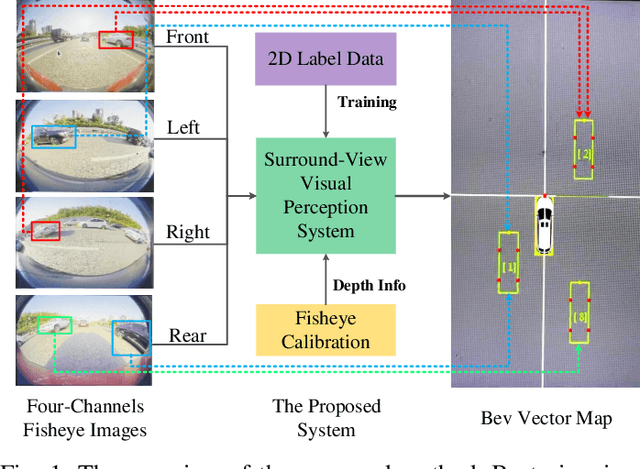
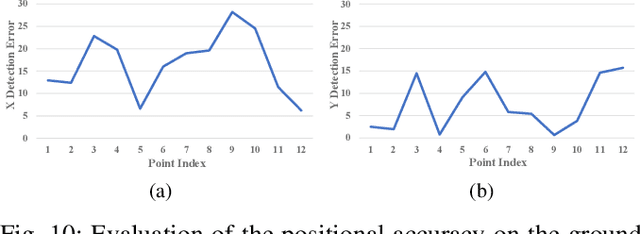
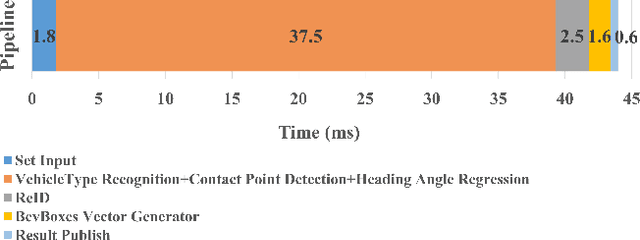
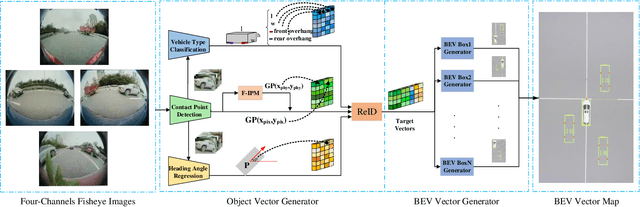
The 3D visual perception for vehicles with the surround-view fisheye camera system is a critical and challenging task for low-cost urban autonomous driving. While existing monocular 3D object detection methods perform not well enough on the fisheye images for mass production, partly due to the lack of 3D datasets of such images. In this paper, we manage to overcome and avoid the difficulty of acquiring the large scale of accurate 3D labeled truth data, by breaking down the 3D object detection task into some sub-tasks, such as vehicle's contact point detection, type classification, re-identification and unit assembling, etc. Particularly, we propose the concept of Multidimensional Vector to include the utilizable information generated in different dimensions and stages, instead of the descriptive approach for the bird's eye view (BEV) or a cube of eight points. The experiments of real fisheye images demonstrate that our solution achieves state-of-the-art accuracy while being real-time in practice.
DeepWORD: A GCN-based Approach for Owner-Member Relationship Detection in Autonomous Driving
Apr 20, 2021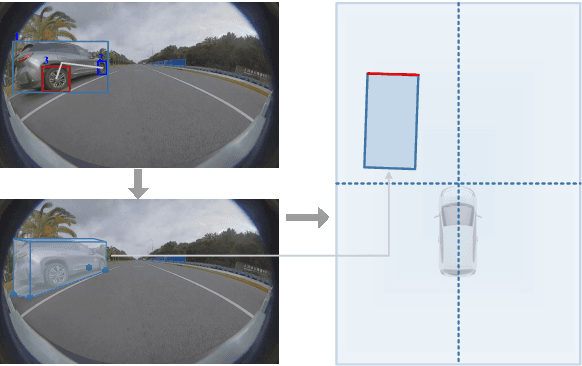

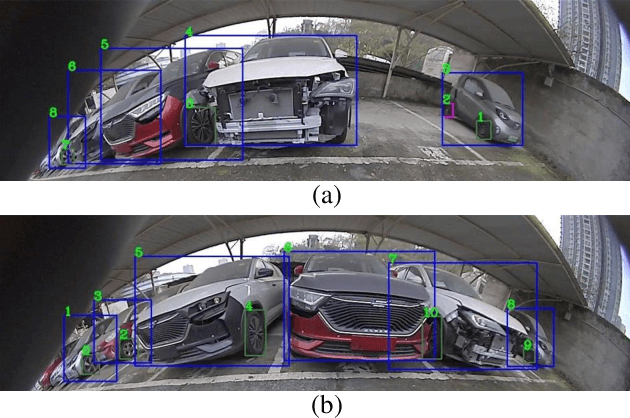
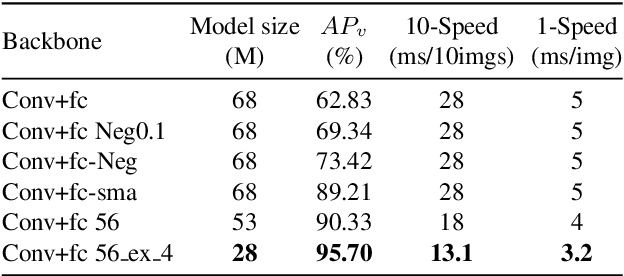
It's worth noting that the owner-member relationship between wheels and vehicles has an significant contribution to the 3D perception of vehicles, especially in the embedded environment. However, there are currently two main challenges about the above relationship prediction: i) The traditional heuristic methods based on IoU can hardly deal with the traffic jam scenarios for the occlusion. ii) It is difficult to establish an efficient applicable solution for the vehicle-mounted system. To address these issues, we propose an innovative relationship prediction method, namely DeepWORD, by designing a graph convolution network (GCN). Specifically, we utilize the feature maps with local correlation as the input of nodes to improve the information richness. Besides, we introduce the graph attention network (GAT) to dynamically amend the prior estimation deviation. Furthermore, we establish an annotated owner-member relationship dataset called WORD as a large-scale benchmark, which will be available soon. The experiments demonstrate that our solution achieves state-of-the-art accuracy and real-time in practice.