 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReplication of Multi-agent Reinforcement Learning for the "Hide and Seek" Problem
Oct 09, 2023



Reinforcement learning generates policies based on reward functions and hyperparameters. Slight changes in these can significantly affect results. The lack of documentation and reproducibility in Reinforcement learning research makes it difficult to replicate once-deduced strategies. While previous research has identified strategies using grounded maneuvers, there is limited work in more complex environments. The agents in this study are simulated similarly to Open Al's hider and seek agents, in addition to a flying mechanism, enhancing their mobility, and expanding their range of possible actions and strategies. This added functionality improves the Hider agents to develop a chasing strategy from approximately 2 million steps to 1.6 million steps and hiders
Towards Agent-Based Model Specification in Smart Grid: A Cognitive Agent-based Computing Approach
Nov 18, 2017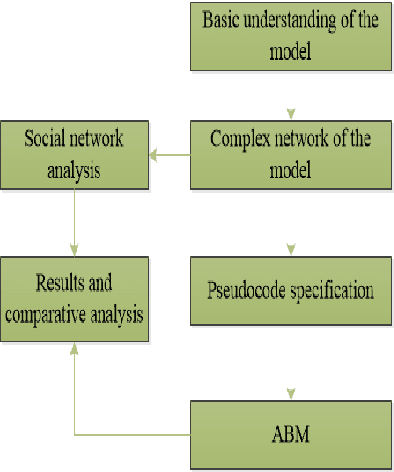
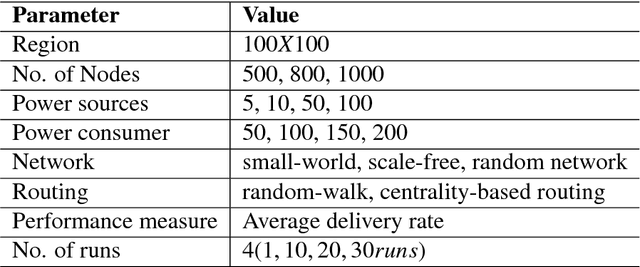
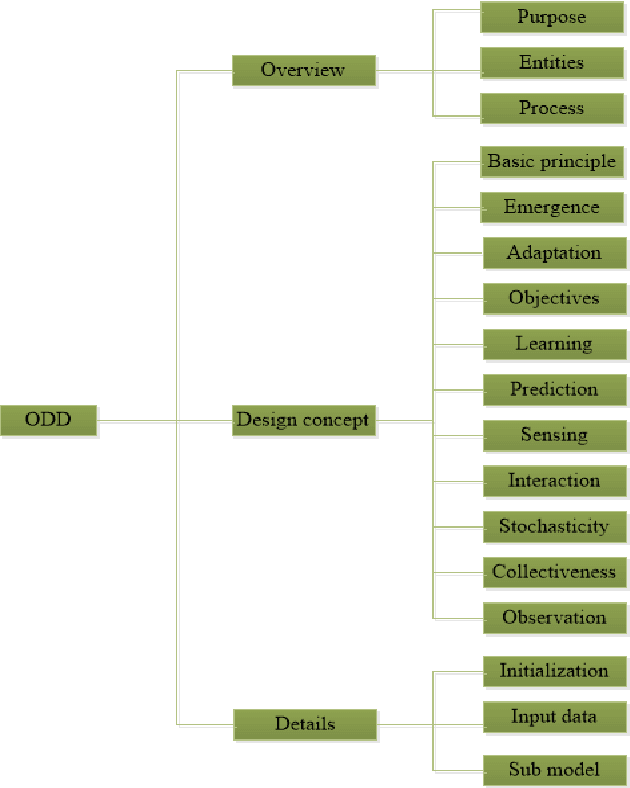

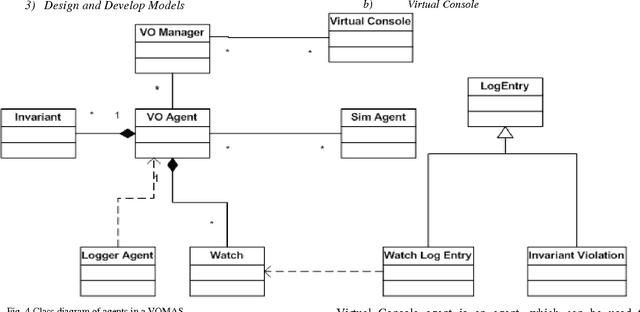
A smart grid can be considered as a complex network where each node represents a generation unit or a consumer. Whereas links can be used to represent transmission lines. One way to study complex systems is by using the agent-based modeling (ABM) paradigm. An ABM is a way of representing a complex system of autonomous agents interacting with each other. Previously, a number of studies have been presented in the smart grid domain making use of the ABM paradigm. However, to the best of our knowledge, none of these studies have focused on the specification aspect of ABM. An ABM specification is important not only for understanding but also for replication of the model. In this study, we focus on development as well as specification of ABM for smart grid. We propose an ABM by using a combination of agent-based and complex network-based approaches. For ABM specification, we use ODD and DREAM specification approaches. We analyze these two specification approaches qualitatively as well as quantitatively. Extensive experiments demonstrate that DREAM is a most useful approach as compared with ODD for modeling as well as for replication of models for smart grid.
Towards Self-organized Large-Scale Shape Formation: A Cognitive Agent-Based Computing Approach
Nov 17, 2017
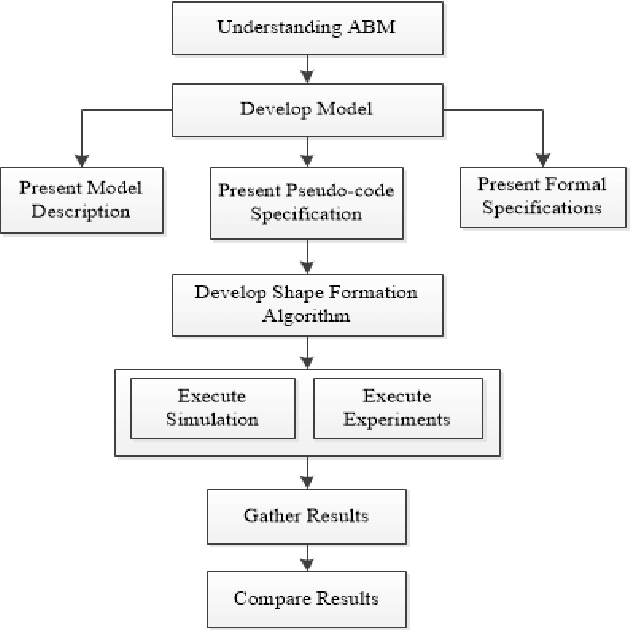
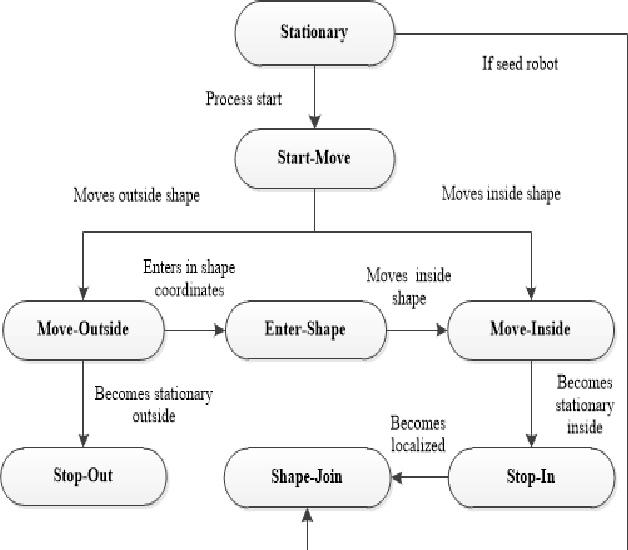
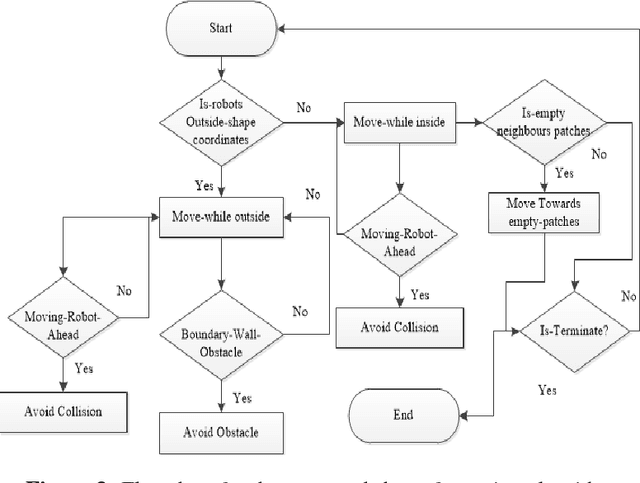
Swarm robotic systems are currently being used to address many real-world problems. One interesting application of swarm robotics is the self-organized formation of structures and shapes. Some of the key challenges in the swarm robotic systems include swarm size constraint, random motion, coordination among robots, localization, and adaptability in a decentralized environment. Rubenstein et al. presented a system ("Programmable self-assembly in a thousand-robot swarm", Science, 2014) for thousand-robot swarm able to form only solid shapes with the robots in aggregated form by applying the collective behavior algorithm. Even though agent-based approaches have been presented in various studies for self-organized formation, however these studies lack agent-based modeling (ABM) approach along with the constraints in term of structure complexity and heterogeneity in large swarms with dynamic localization. The cognitive agent-based computing (CABC) approach is capable of modeling such self-organization based multi-agents systems (MAS). In this paper, we develop a simulation model using ABM under CABC approach for self-organized shape formation in swarm robots. We propose a shape formation algorithm for validating our model and perform simulation-based experiments for six different shapes including hole-based shapes. We also demonstrate the formal specification for our model. The simulation result shows the robustness of the proposed approach having the emergent behavior of robots for the self-organized shape formation. The performance of the proposed approach is evaluated by robots convergence rate.
A novel agent-based simulation framework for sensing in complex adaptive environments
Aug 19, 2017



In this paper we present a novel Formal Agent-Based Simulation framework (FABS). FABS uses formal specification as a means of clear description of wireless sensor networks (WSN) sensing a Complex Adaptive Environment. This specification model is then used to develop an agent-based model of both the wireless sensor network as well as the environment. As proof of concept, we demonstrate the application of FABS to a boids model of self-organized flocking of animals monitored by a random deployment of proximity sensors.
* 8 pages
Agent-based computing from multi-agent systems to agent-based Models: a visual survey
Aug 19, 2017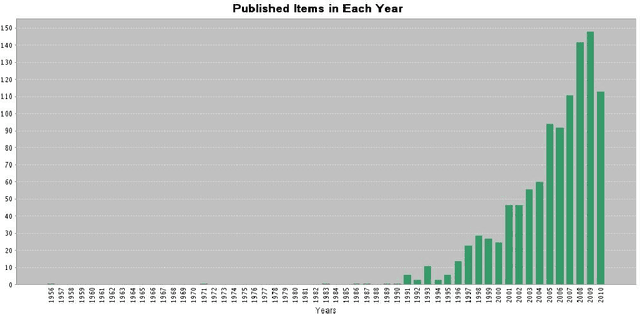
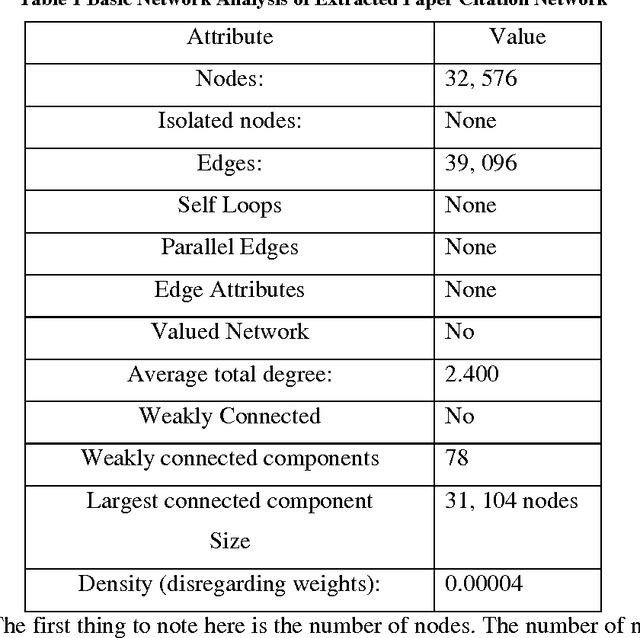
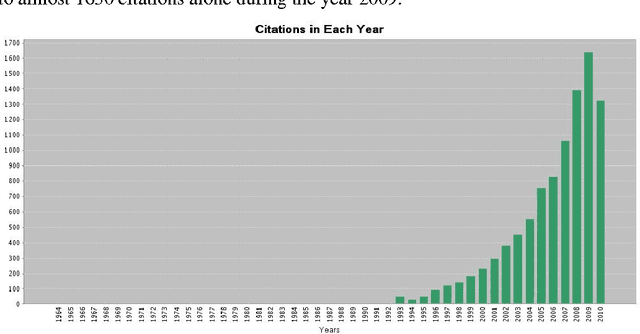
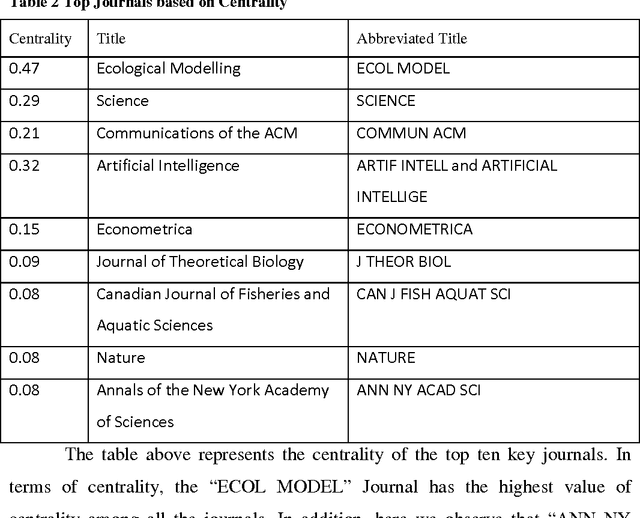
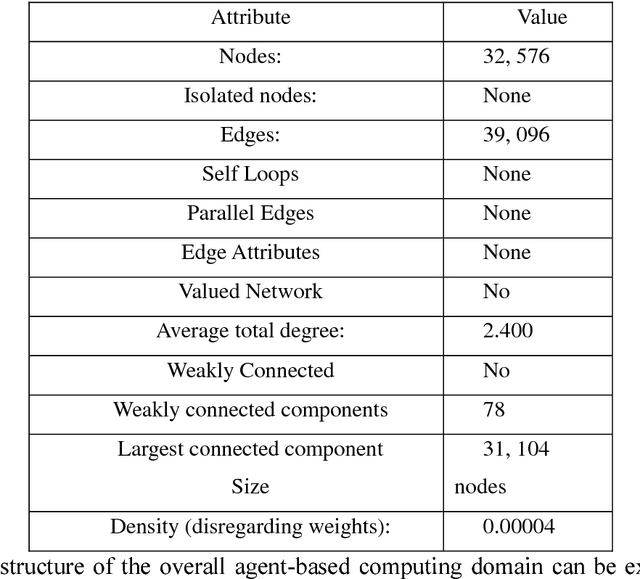
Agent-Based Computing is a diverse research domain concerned with the building of intelligent software based on the concept of "agents". In this paper, we use Scientometric analysis to analyze all sub-domains of agent-based computing. Our data consists of 1,064 journal articles indexed in the ISI web of knowledge published during a twenty year period: 1990-2010. These were retrieved using a topic search with various keywords commonly used in sub-domains of agent-based computing. In our proposed approach, we have employed a combination of two applications for analysis, namely Network Workbench and CiteSpace - wherein Network Workbench allowed for the analysis of complex network aspects of the domain, detailed visualization-based analysis of the bibliographic data was performed using CiteSpace. Our results include the identification of the largest cluster based on keywords, the timeline of publication of index terms, the core journals and key subject categories. We also identify the core authors, top countries of origin of the manuscripts along with core research institutes. Finally, our results have interestingly revealed the strong presence of agent-based computing in a number of non-computing related scientific domains including Life Sciences, Ecological Sciences and Social Sciences.
* 30 pages, 11 figures, 9 tables
Technical Problems With "Programmable self-assembly in a thousand-robot swarm"
Aug 10, 2017Rubenstein et al. present an interesting system of programmable self-assembled structure formation using 1000 Kilobot robots. The paper claims to advance work in artificial swarms similar to capabilities of natural systems besides being highly robust. However, the system lacks in terms of matching motility and complex shapes with holes, thereby limiting practical similarity to self-assembly in living systems.
Verification & Validation of Agent Based Simulations using the VOMAS (Virtual Overlay Multi-agent System) approach
Aug 08, 2017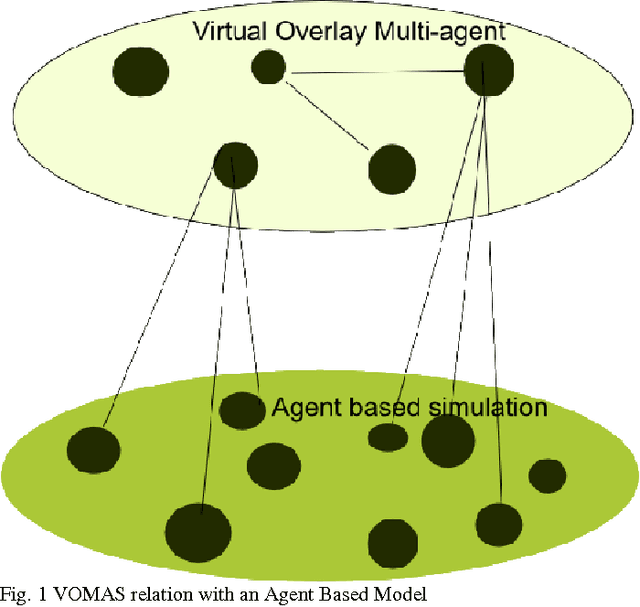
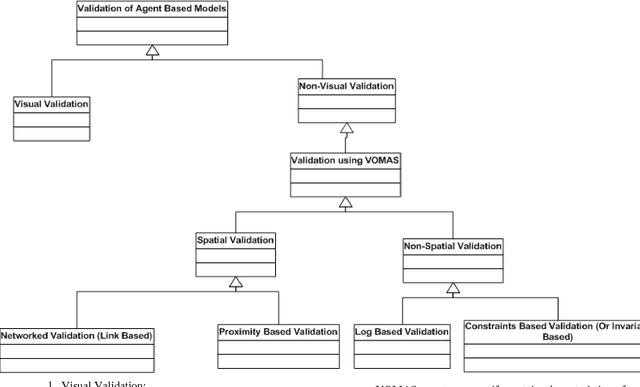
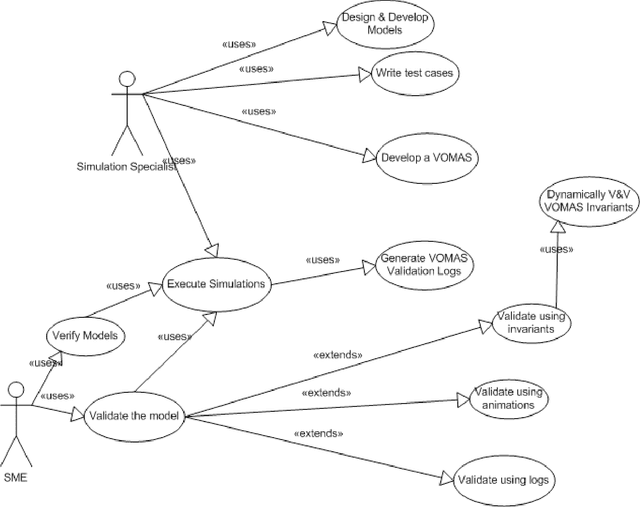
Agent Based Models are very popular in a number of different areas. For example, they have been used in a range of domains ranging from modeling of tumor growth, immune systems, molecules to models of social networks, crowds and computer and mobile self-organizing networks. One reason for their success is their intuitiveness and similarity to human cognition. However, with this power of abstraction, in spite of being easily applicable to such a wide number of domains, it is hard to validate agent-based models. In addition, building valid and credible simulations is not just a challenging task but also a crucial exercise to ensure that what we are modeling is, at some level of abstraction, a model of our conceptual system; the system that we have in mind. In this paper, we address this important area of validation of agent based models by presenting a novel technique which has broad applicability and can be applied to all kinds of agent-based models. We present a framework, where a virtual overlay multi-agent system can be used to validate simulation models. In addition, since agent-based models have been typically growing, in parallel, in multiple domains, to cater for all of these, we present a new single validation technique applicable to all agent based models. Our technique, which allows for the validation of agent based simulations uses VOMAS: a Virtual Overlay Multi-agent System. This overlay multi-agent system can comprise various types of agents, which form an overlay on top of the agent based simulation model that needs to be validated. Other than being able to watch and log, each of these agents contains clearly defined constraints, which, if violated, can be logged in real time. To demonstrate its effectiveness, we show its broad applicability in a wide variety of simulation models ranging from social sciences to computer networks in spatial and non-spatial conceptual models.
Towards A Novel Unified Framework for Developing Formal, Network and Validated Agent-Based Simulation Models of Complex Adaptive Systems
Aug 08, 2017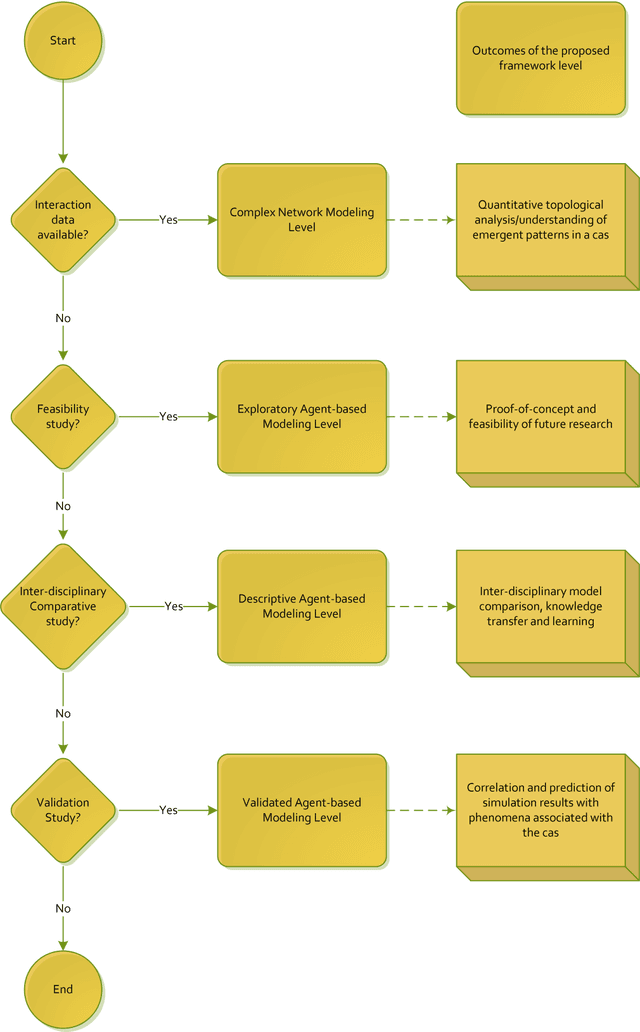
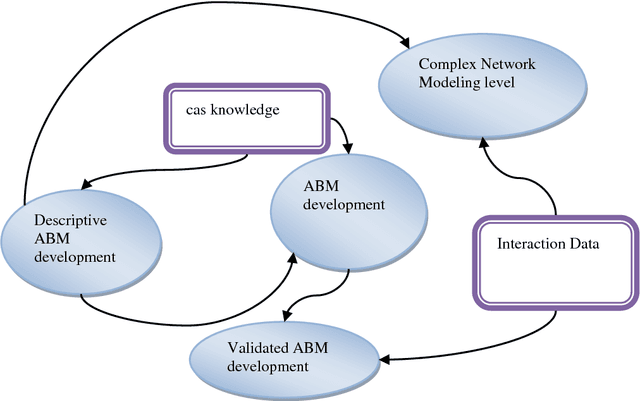
Literature on the modeling and simulation of complex adaptive systems (cas) has primarily advanced vertically in different scientific domains with scientists developing a variety of domain-specific approaches and applications. However, while cas researchers are inher-ently interested in an interdisciplinary comparison of models, to the best of our knowledge, there is currently no single unified framework for facilitating the development, comparison, communication and validation of models across different scientific domains. In this thesis, we propose first steps towards such a unified framework using a combination of agent-based and complex network-based modeling approaches and guidelines formulated in the form of a set of four levels of usage, which allow multidisciplinary researchers to adopt a suitable framework level on the basis of available data types, their research study objectives and expected outcomes, thus allowing them to better plan and conduct their respective re-search case studies.
Towards Social Autonomous Vehicles: Efficient Collision Avoidance Scheme Using Richardson's Arms Race Model
Aug 06, 2017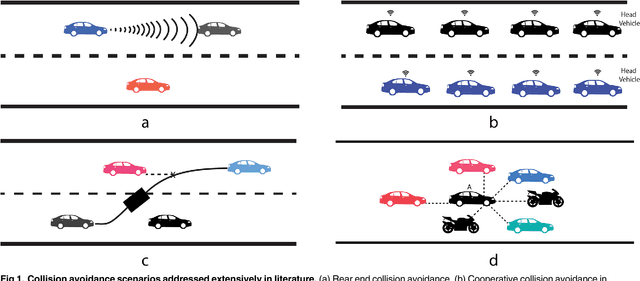
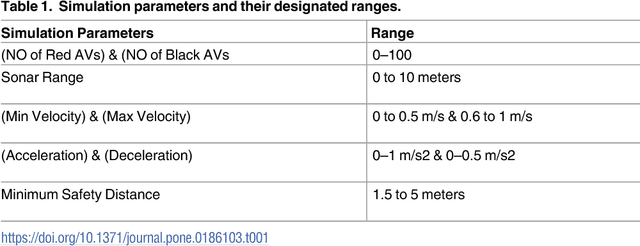
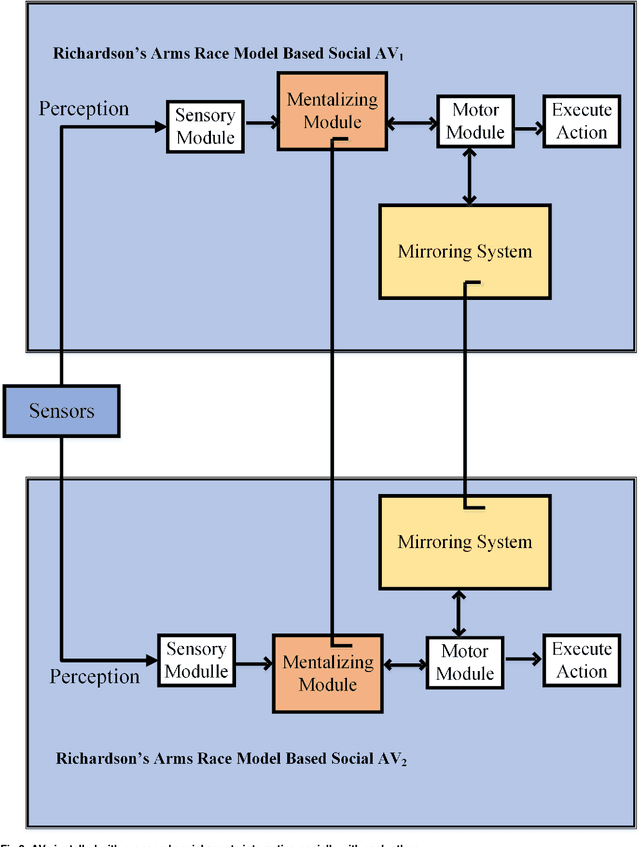
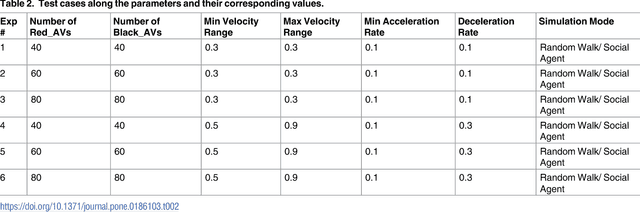
Background Road collisions and casualties pose a serious threat to commuters around the globe. Autonomous Vehicles (AVs) aim to make the use of technology to reduce the road accidents. However, the most of research work in the context of collision avoidance has been performed to address, separately, the rear end, front end and lateral collisions in less congested and with high inter-vehicular distances. Purpose The goal of this paper is to introduce the concept of a social agent, which interact with other AVs in social manners like humans are social having the capability of predicting intentions, i.e. mentalizing and copying the actions of each other, i.e. mirroring. The proposed social agent is based on a human-brain inspired mentalizing and mirroring capabilities and has been modelled for collision detection and avoidance under congested urban road traffic. Method We designed our social agent having the capabilities of mentalizing and mirroring and for this purpose we utilized Exploratory Agent Based Modeling (EABM) level of Cognitive Agent Based Computing (CABC) framework proposed by Niazi and Hussain. Results Our simulation and practical experiments reveal that by embedding Richardson's arms race model within AVs, collisions can be avoided while travelling on congested urban roads in a flock like topologies. The performance of the proposed social agent has been compared at two different levels.
* 48 pages, 21 figures
Enhanced Emotion Enabled Cognitive Agent Based Rear End Collision Avoidance Controller for Autonomous Vehicles
Aug 06, 2017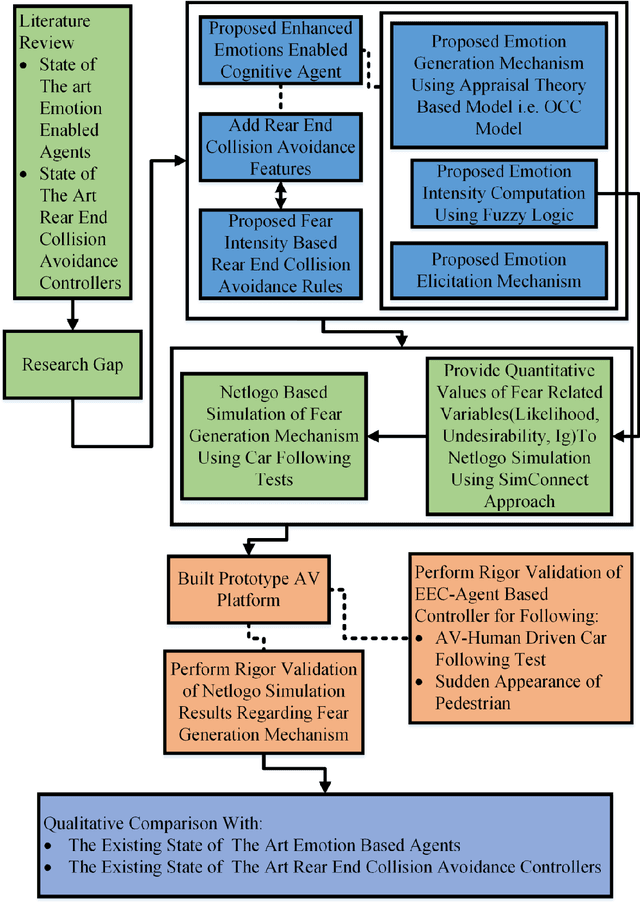
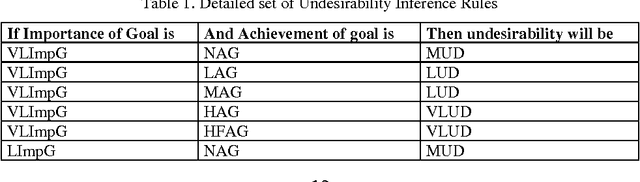
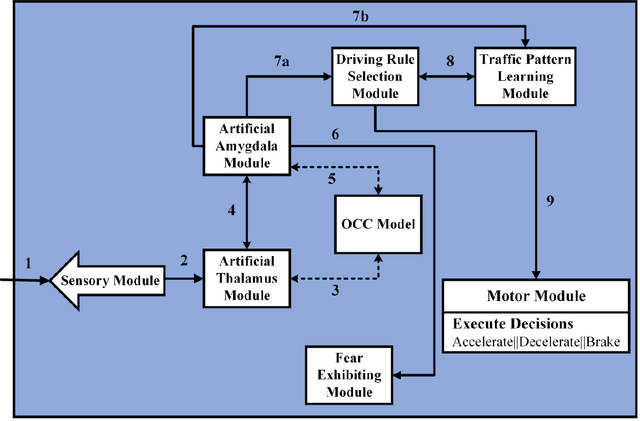
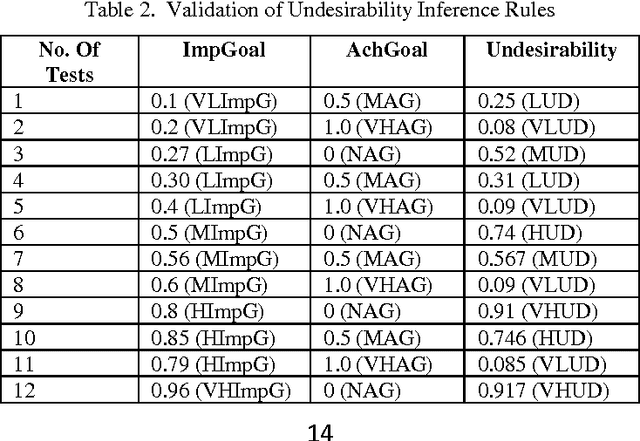
Rear end collisions are deadliest in nature and cause most of traffic casualties and injuries. In the existing research, many rear end collision avoidance solutions have been proposed. However, the problem with these proposed solutions is that they are highly dependent on precise mathematical models. Whereas, the real road driving is influenced by non-linear factors such as road surface situations, driver reaction time, pedestrian flow and vehicle dynamics, hence obtaining the accurate mathematical model of the vehicle control system is challenging. This problem with precise control based rear end collision avoidance schemes has been addressed using fuzzy logic, but the excessive number of fuzzy rules straightforwardly prejudice their efficiency. Furthermore, these fuzzy logic based controllers have been proposed without using proper agent based modeling that helps in mimicking the functions of an artificial human driver executing these fuzzy rules. Keeping in view these limitations, we have proposed an Enhanced Emotion Enabled Cognitive Agent (EEEC_Agent) based controller that helps the Autonomous Vehicles (AVs) to perform rear end collision avoidance with less number of rules, designed after fear emotion, and high efficiency. To introduce a fear emotion generation mechanism in EEEC_Agent, Orton, Clore & Collins (OCC) model has been employed. The fear generation mechanism of EEEC_Agent has been verified using NetLogo simulation. Furthermore, practical validation of EEEC_Agent functions has been performed using specially built prototype AV platform. Eventually, the qualitative comparative study with existing state of the art research works reflect that proposed model outperforms recent research.