 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Social Autonomous Vehicles: Efficient Collision Avoidance Scheme Using Richardson's Arms Race Model
Aug 06, 2017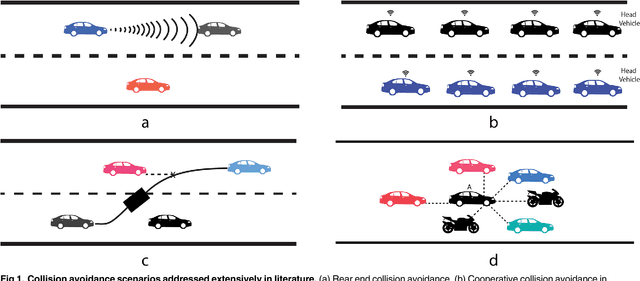
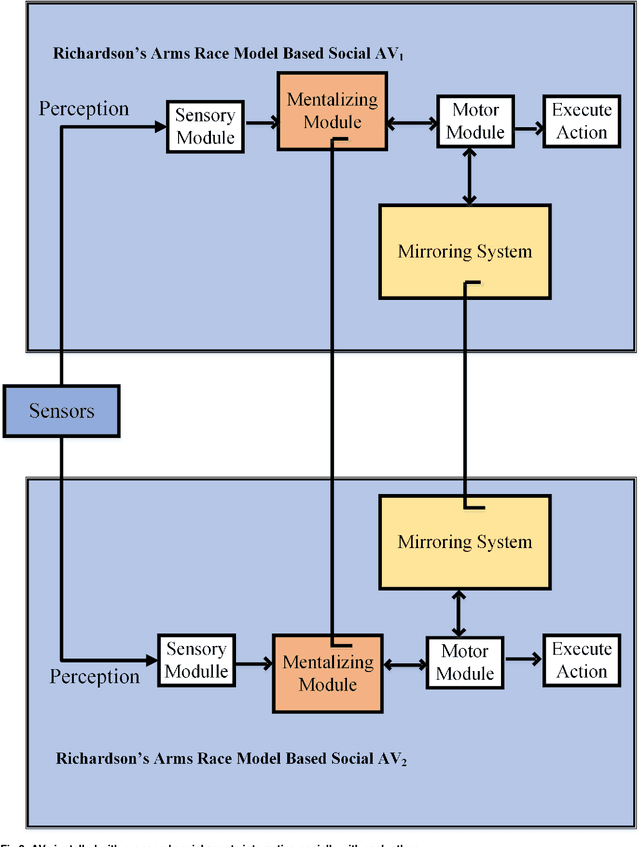
Background Road collisions and casualties pose a serious threat to commuters around the globe. Autonomous Vehicles (AVs) aim to make the use of technology to reduce the road accidents. However, the most of research work in the context of collision avoidance has been performed to address, separately, the rear end, front end and lateral collisions in less congested and with high inter-vehicular distances. Purpose The goal of this paper is to introduce the concept of a social agent, which interact with other AVs in social manners like humans are social having the capability of predicting intentions, i.e. mentalizing and copying the actions of each other, i.e. mirroring. The proposed social agent is based on a human-brain inspired mentalizing and mirroring capabilities and has been modelled for collision detection and avoidance under congested urban road traffic. Method We designed our social agent having the capabilities of mentalizing and mirroring and for this purpose we utilized Exploratory Agent Based Modeling (EABM) level of Cognitive Agent Based Computing (CABC) framework proposed by Niazi and Hussain. Results Our simulation and practical experiments reveal that by embedding Richardson's arms race model within AVs, collisions can be avoided while travelling on congested urban roads in a flock like topologies. The performance of the proposed social agent has been compared at two different levels.
* 48 pages, 21 figures
Enhanced Emotion Enabled Cognitive Agent Based Rear End Collision Avoidance Controller for Autonomous Vehicles
Aug 06, 2017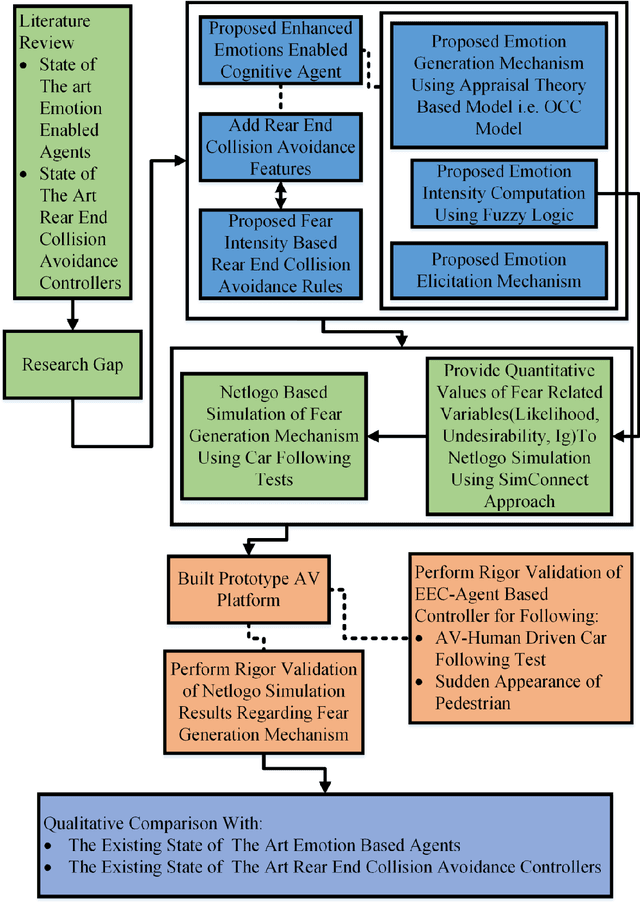
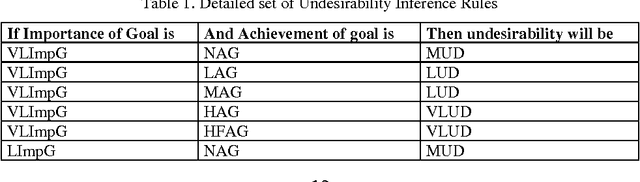
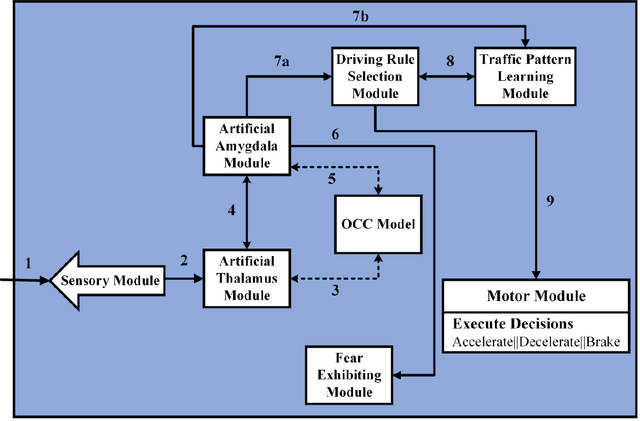
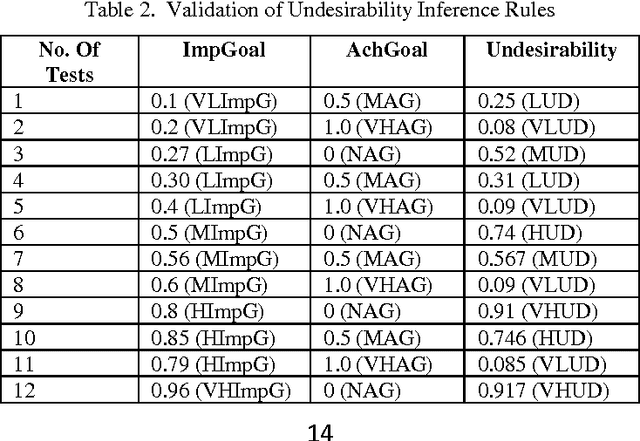
Rear end collisions are deadliest in nature and cause most of traffic casualties and injuries. In the existing research, many rear end collision avoidance solutions have been proposed. However, the problem with these proposed solutions is that they are highly dependent on precise mathematical models. Whereas, the real road driving is influenced by non-linear factors such as road surface situations, driver reaction time, pedestrian flow and vehicle dynamics, hence obtaining the accurate mathematical model of the vehicle control system is challenging. This problem with precise control based rear end collision avoidance schemes has been addressed using fuzzy logic, but the excessive number of fuzzy rules straightforwardly prejudice their efficiency. Furthermore, these fuzzy logic based controllers have been proposed without using proper agent based modeling that helps in mimicking the functions of an artificial human driver executing these fuzzy rules. Keeping in view these limitations, we have proposed an Enhanced Emotion Enabled Cognitive Agent (EEEC_Agent) based controller that helps the Autonomous Vehicles (AVs) to perform rear end collision avoidance with less number of rules, designed after fear emotion, and high efficiency. To introduce a fear emotion generation mechanism in EEEC_Agent, Orton, Clore & Collins (OCC) model has been employed. The fear generation mechanism of EEEC_Agent has been verified using NetLogo simulation. Furthermore, practical validation of EEEC_Agent functions has been performed using specially built prototype AV platform. Eventually, the qualitative comparative study with existing state of the art research works reflect that proposed model outperforms recent research.
Emotion Controlled Spectrum Mobility Scheme for Efficient Syntactic Interoperability In Cognitive Radio Based Internet of Vehicles
Aug 06, 2017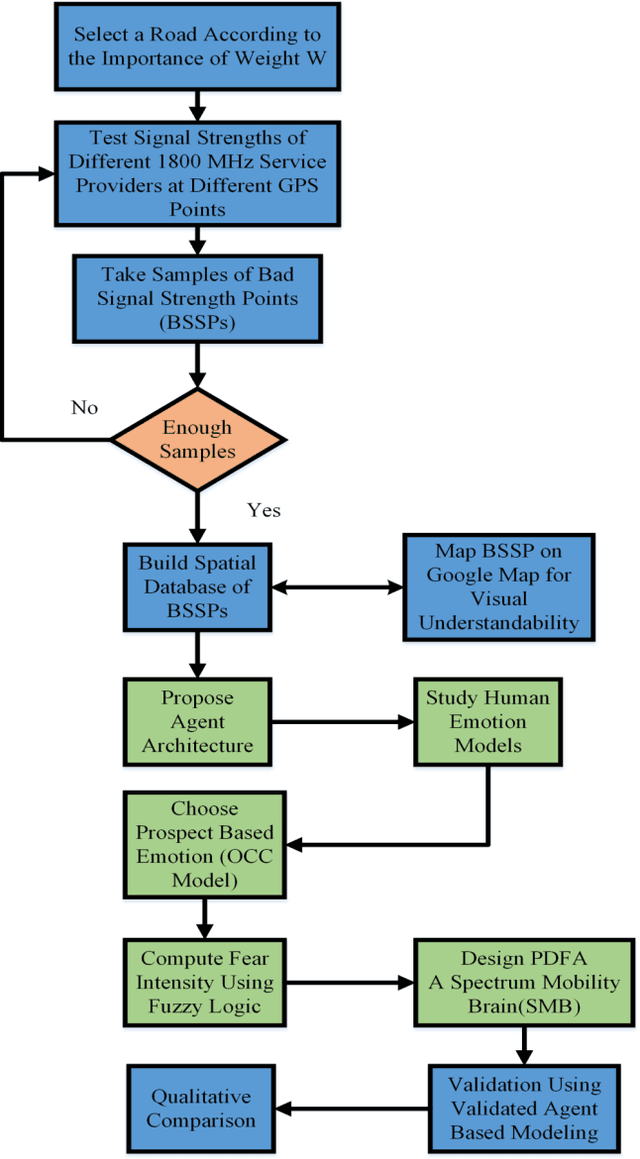
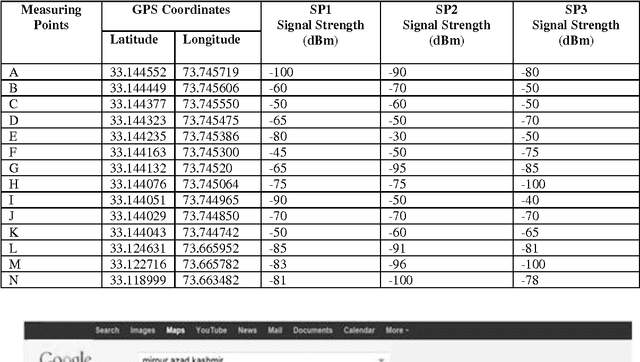


Blind spots are one of the causes of road accidents in the hilly and flat areas. These blind spot accidents can be decreased by establishing an Internet of Vehicles (IoV) using Vehicle-2-Vehicle (V2V) and Vehicle-2-Infrastrtructure (V2I) communication systems. But the problem with these IoV is that most of them are using DSRC or single Radio Access Technology (RAT) as a wireless technology, which has been proven to be failed for efficient communication between vehicles. Recently, Cognitive Radio (CR) based IoV have to be proven best wireless communication systems for vehicular networks. However, the spectrum mobility is a challenging task to keep CR based vehicular networks interoperable and has not been addressed sufficiently in existing research. In our previous research work, the Cognitive Radio Site (CR-Site) has been proposed as in-vehicle CR-device, which can be utilized to establish efficient IoV systems. H In this paper, we have introduced the Emotions Inspired Cognitive Agent (EIC_Agent) based spectrum mobility mechanism in CR-Site and proposed a novel emotions controlled spectrum mobility scheme for efficient syntactic interoperability between vehicles. For this purpose, a probabilistic deterministic finite automaton using fear factor is proposed to perform efficient spectrum mobility using fuzzy logic. In addition, the quantitative computation of different fear intensity levels has been performed with the help of fuzzy logic. The system has been tested using active data from different GSM service providers on Mangla-Mirpur road. This is supplemented by extensive simulation experiments which validate the proposed scheme for CR based high-speed vehicular networks. The qualitative comparison with the existing-state-of the-art has proven the superiority of the proposed emotions controlled syntactic interoperable spectrum mobility scheme within cognitive radio based IoV systems.
Designing Autonomous Vehicles: Evaluating the Role of Human Emotions and Social Norms
Aug 06, 2017
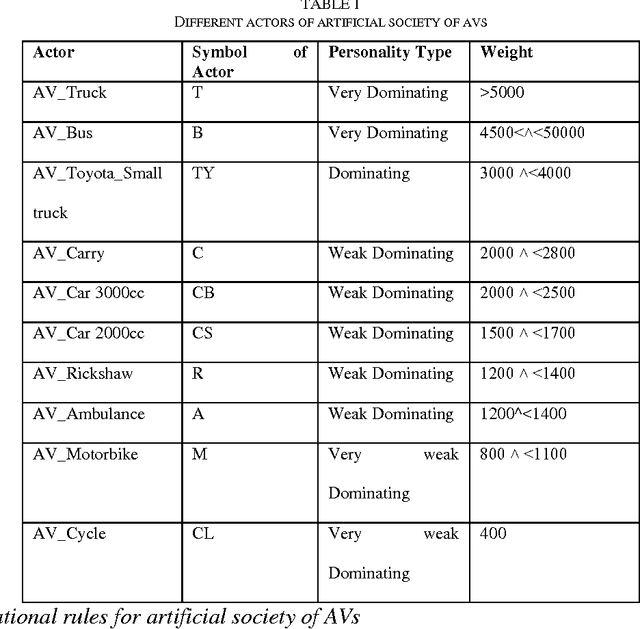

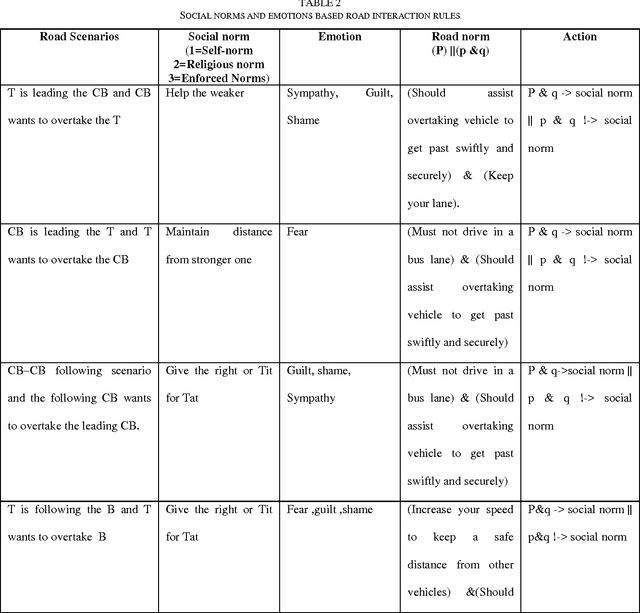
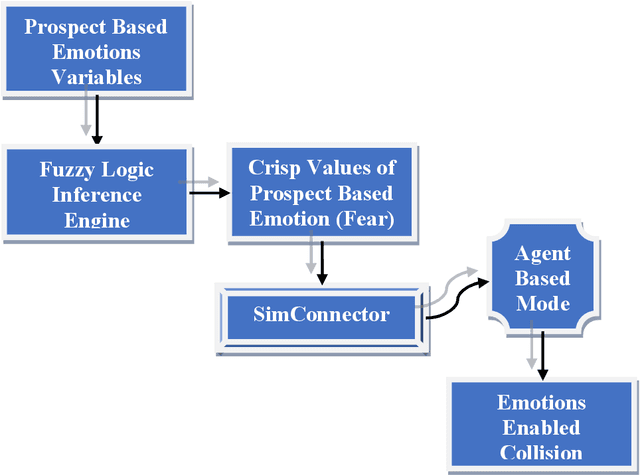
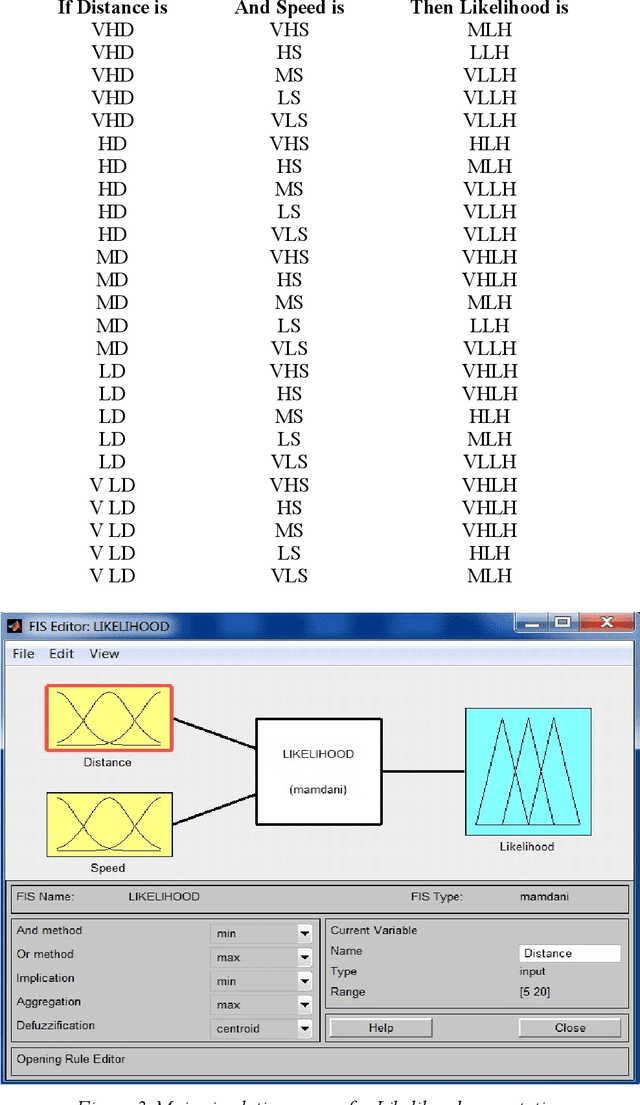
Humans are going to delegate the rights of driving to the autonomous vehicles in near future. However, to fulfill this complicated task, there is a need for a mechanism, which enforces the autonomous vehicles to obey the road and social rules that have been practiced by well-behaved drivers. This task can be achieved by introducing social norms compliance mechanism in the autonomous vehicles. This research paper is proposing an artificial society of autonomous vehicles as an analogy of human social society. Each AV has been assigned a social personality having different social influence. Social norms have been introduced which help the AVs in making the decisions, influenced by emotions, regarding road collision avoidance. Furthermore, social norms compliance mechanism, by artificial social AVs, has been proposed using prospect based emotion i.e. fear, which is conceived from OCC model. Fuzzy logic has been employed to compute the emotions quantitatively. Then, using SimConnect approach, fuzzy values of fear has been provided to the Netlogo simulation environment to simulate artificial society of AVs. Extensive testing has been performed using the behavior space tool to find out the performance of the proposed approach in terms of the number of collisions. For comparison, the random-walk model based artificial society of AVs has been proposed as well. A comparative study with a random walk, prove that proposed approach provides a better option to tailor the autopilots of future AVS, Which will be more socially acceptable and trustworthy by their riders in terms of safe road travel.
Validation of Enhanced Emotion Enabled Cognitive Agent Using Virtual Overlay Multi-Agent System Approach
Aug 04, 2017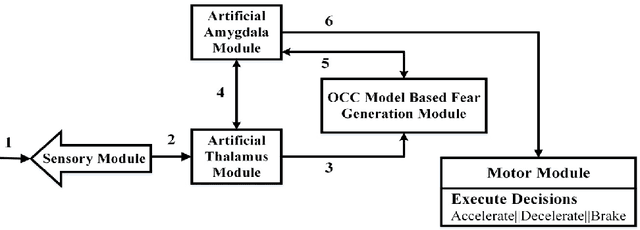
Making roads safer by avoiding road collisions is one of the main reasons for inventing Autonomous vehicles (AVs). In this context, designing agent-based collision avoidance components of AVs which truly represent human cognition and emotions look is a more feasible approach as agents can replace human drivers. However, to the best of our knowledge, very few human emotion and cognition-inspired agent-based studies have previously been conducted in this domain. Furthermore, these agent-based solutions have not been validated using any key validation technique. Keeping in view this lack of validation practices, we have selected state-of-the-art Emotion Enabled Cognitive Agent (EEC_Agent), which was proposed to avoid lateral collisions between semi-AVs. The architecture of EEC_Agent has been revised using Exploratory Agent Based Modeling (EABM) level of the Cognitive Agent Based Computing (CABC) framework and real-time fear emotion generation mechanism using the Ortony, Clore & Collins (OCC) model has also been introduced. Then the proposed fear generation mechanism has been validated using the Validated Agent Based Modeling level of CABC framework using a Virtual Overlay MultiAgent System (VOMAS). Extensive simulation and practical experiments demonstrate that the Enhanced EEC_Agent exhibits the capability to feel different levels of fear, according to different traffic situations and also needs a smaller Stopping Sight Distance (SSD) and Overtaking Sight Distance (OSD) as compared to human drivers.
* 35 pages, 21 figures, 19 tables