 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Autonomous Vehicles: Evaluating the Role of Human Emotions and Social Norms
Paper and Code
Aug 06, 2017
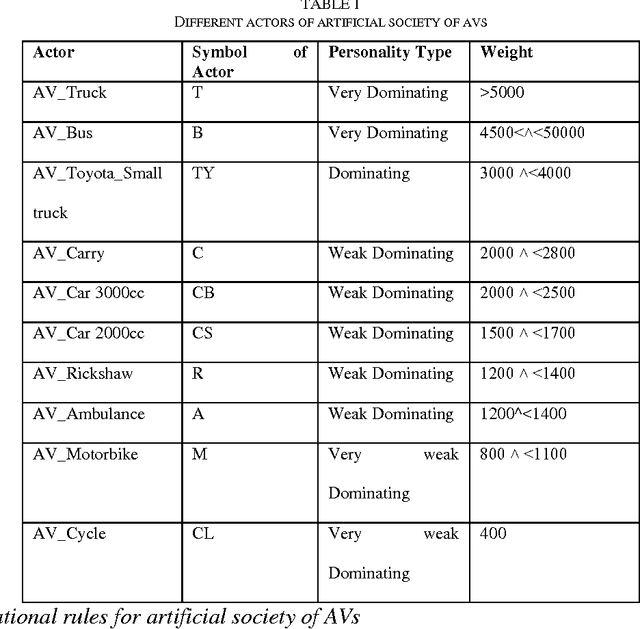

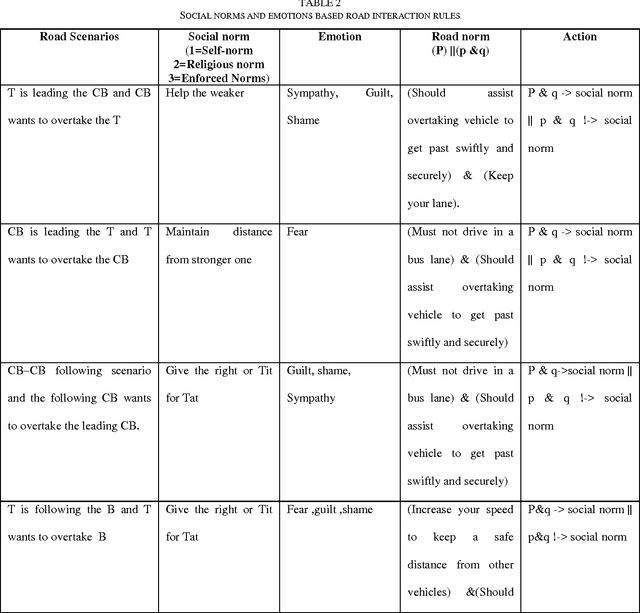
Humans are going to delegate the rights of driving to the autonomous vehicles in near future. However, to fulfill this complicated task, there is a need for a mechanism, which enforces the autonomous vehicles to obey the road and social rules that have been practiced by well-behaved drivers. This task can be achieved by introducing social norms compliance mechanism in the autonomous vehicles. This research paper is proposing an artificial society of autonomous vehicles as an analogy of human social society. Each AV has been assigned a social personality having different social influence. Social norms have been introduced which help the AVs in making the decisions, influenced by emotions, regarding road collision avoidance. Furthermore, social norms compliance mechanism, by artificial social AVs, has been proposed using prospect based emotion i.e. fear, which is conceived from OCC model. Fuzzy logic has been employed to compute the emotions quantitatively. Then, using SimConnect approach, fuzzy values of fear has been provided to the Netlogo simulation environment to simulate artificial society of AVs. Extensive testing has been performed using the behavior space tool to find out the performance of the proposed approach in terms of the number of collisions. For comparison, the random-walk model based artificial society of AVs has been proposed as well. A comparative study with a random walk, prove that proposed approach provides a better option to tailor the autopilots of future AVS, Which will be more socially acceptable and trustworthy by their riders in terms of safe road travel.