 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Social Autonomous Vehicles: Efficient Collision Avoidance Scheme Using Richardson's Arms Race Model
Paper and Code
Aug 06, 2017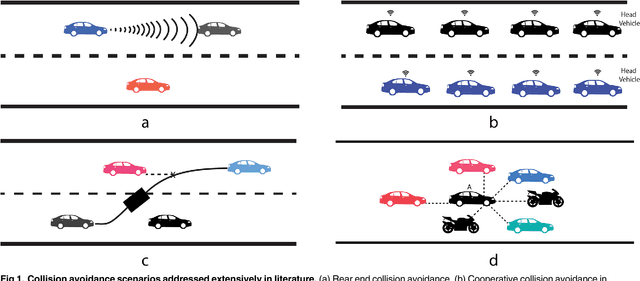
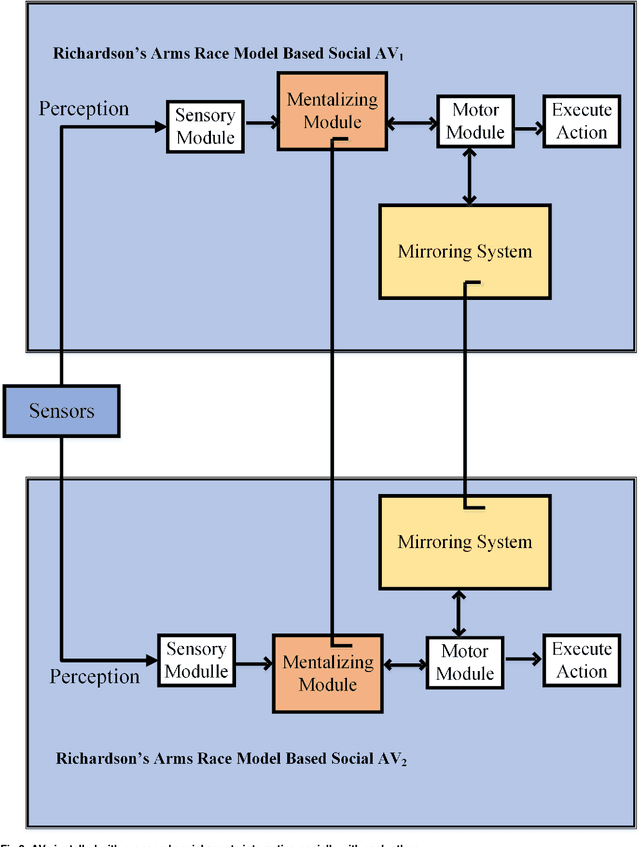
Background Road collisions and casualties pose a serious threat to commuters around the globe. Autonomous Vehicles (AVs) aim to make the use of technology to reduce the road accidents. However, the most of research work in the context of collision avoidance has been performed to address, separately, the rear end, front end and lateral collisions in less congested and with high inter-vehicular distances. Purpose The goal of this paper is to introduce the concept of a social agent, which interact with other AVs in social manners like humans are social having the capability of predicting intentions, i.e. mentalizing and copying the actions of each other, i.e. mirroring. The proposed social agent is based on a human-brain inspired mentalizing and mirroring capabilities and has been modelled for collision detection and avoidance under congested urban road traffic. Method We designed our social agent having the capabilities of mentalizing and mirroring and for this purpose we utilized Exploratory Agent Based Modeling (EABM) level of Cognitive Agent Based Computing (CABC) framework proposed by Niazi and Hussain. Results Our simulation and practical experiments reveal that by embedding Richardson's arms race model within AVs, collisions can be avoided while travelling on congested urban roads in a flock like topologies. The performance of the proposed social agent has been compared at two different levels.