 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeValidation of Enhanced Emotion Enabled Cognitive Agent Using Virtual Overlay Multi-Agent System Approach
Paper and Code
Aug 04, 2017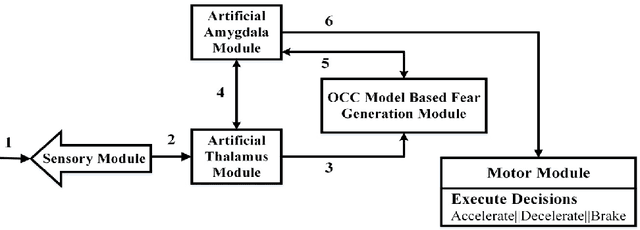
Making roads safer by avoiding road collisions is one of the main reasons for inventing Autonomous vehicles (AVs). In this context, designing agent-based collision avoidance components of AVs which truly represent human cognition and emotions look is a more feasible approach as agents can replace human drivers. However, to the best of our knowledge, very few human emotion and cognition-inspired agent-based studies have previously been conducted in this domain. Furthermore, these agent-based solutions have not been validated using any key validation technique. Keeping in view this lack of validation practices, we have selected state-of-the-art Emotion Enabled Cognitive Agent (EEC_Agent), which was proposed to avoid lateral collisions between semi-AVs. The architecture of EEC_Agent has been revised using Exploratory Agent Based Modeling (EABM) level of the Cognitive Agent Based Computing (CABC) framework and real-time fear emotion generation mechanism using the Ortony, Clore & Collins (OCC) model has also been introduced. Then the proposed fear generation mechanism has been validated using the Validated Agent Based Modeling level of CABC framework using a Virtual Overlay MultiAgent System (VOMAS). Extensive simulation and practical experiments demonstrate that the Enhanced EEC_Agent exhibits the capability to feel different levels of fear, according to different traffic situations and also needs a smaller Stopping Sight Distance (SSD) and Overtaking Sight Distance (OSD) as compared to human drivers.