 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Self-organized Large-Scale Shape Formation: A Cognitive Agent-Based Computing Approach
Paper and Code
Nov 17, 2017
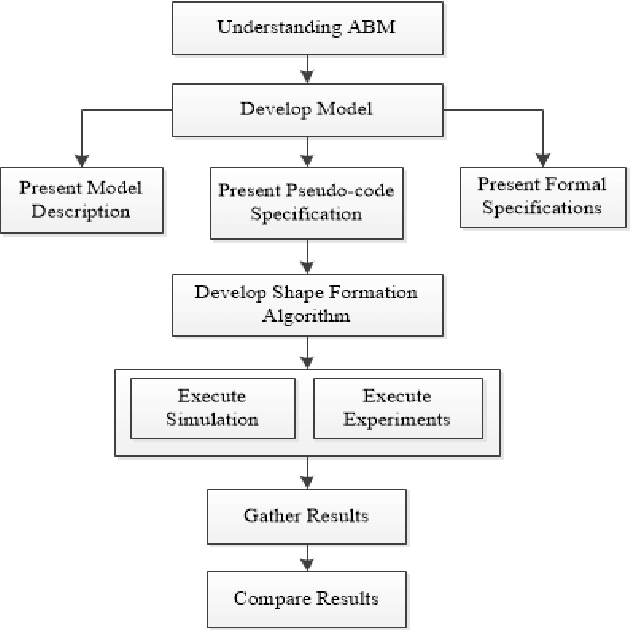
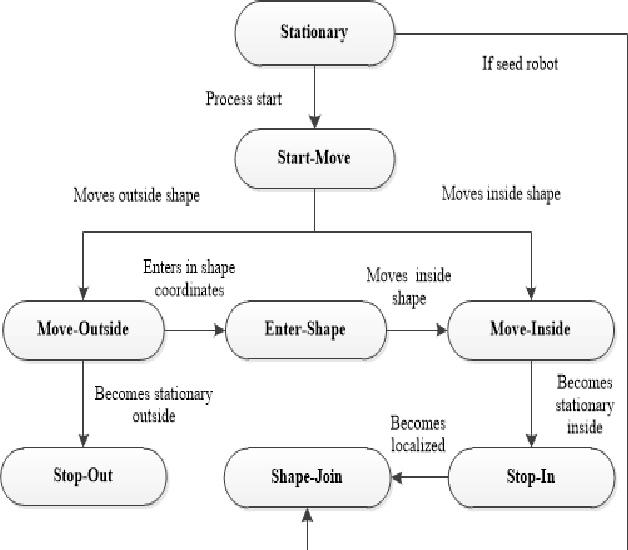
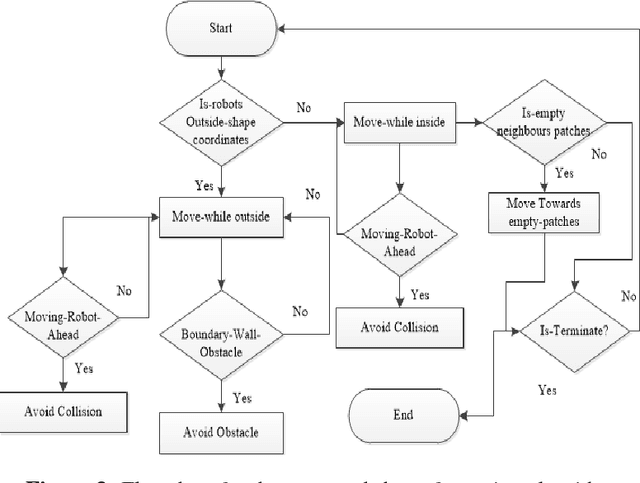
Swarm robotic systems are currently being used to address many real-world problems. One interesting application of swarm robotics is the self-organized formation of structures and shapes. Some of the key challenges in the swarm robotic systems include swarm size constraint, random motion, coordination among robots, localization, and adaptability in a decentralized environment. Rubenstein et al. presented a system ("Programmable self-assembly in a thousand-robot swarm", Science, 2014) for thousand-robot swarm able to form only solid shapes with the robots in aggregated form by applying the collective behavior algorithm. Even though agent-based approaches have been presented in various studies for self-organized formation, however these studies lack agent-based modeling (ABM) approach along with the constraints in term of structure complexity and heterogeneity in large swarms with dynamic localization. The cognitive agent-based computing (CABC) approach is capable of modeling such self-organization based multi-agents systems (MAS). In this paper, we develop a simulation model using ABM under CABC approach for self-organized shape formation in swarm robots. We propose a shape formation algorithm for validating our model and perform simulation-based experiments for six different shapes including hole-based shapes. We also demonstrate the formal specification for our model. The simulation result shows the robustness of the proposed approach having the emergent behavior of robots for the self-organized shape formation. The performance of the proposed approach is evaluated by robots convergence rate.