 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint-repositionable Inner-wireless Planar Snake Robot
Nov 21, 2024
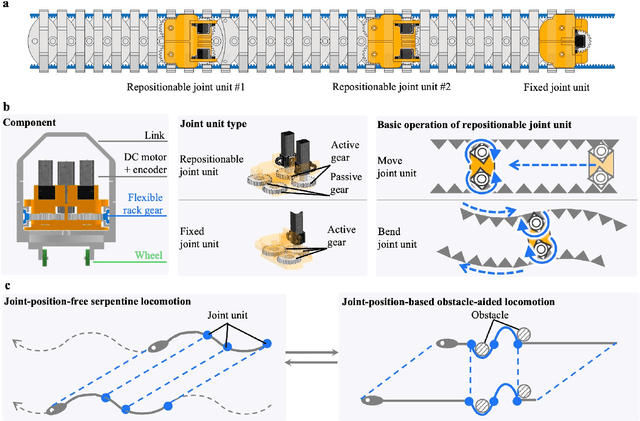
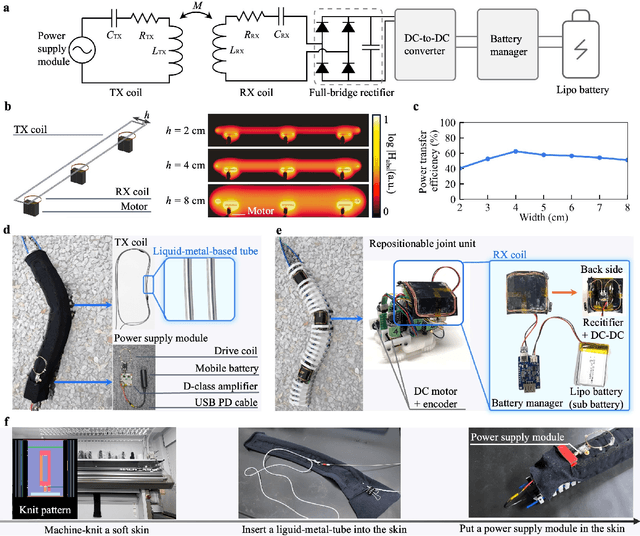
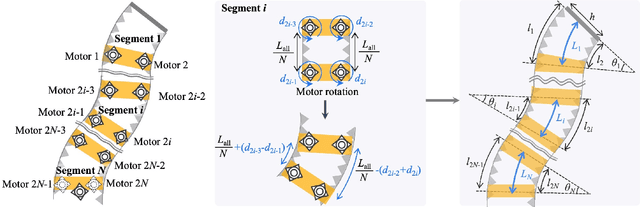
Bio-inspired multi-joint snake robots offer the advantages of terrain adaptability due to their limbless structure and high flexibility. However, a series of dozens of motor units in typical multiple-joint snake robots results in a heavy body structure and hundreds of watts of high power consumption. This paper presents a joint-repositionable, inner-wireless snake robot that enables multi-joint-like locomotion using a low-powered underactuated mechanism. The snake robot, consisting of a series of flexible passive links, can dynamically change its joint coupling configuration by repositioning motor-driven joint units along rack gears inside the robot. Additionally, a soft robot skin wirelessly powers the internal joint units, avoiding the risk of wire tangling and disconnection caused by the movable joint units. The combination of the joint-repositionable mechanism and the wireless-charging-enabled soft skin achieves a high degree of bending, along with a lightweight structure of 1.3 kg and energy-efficient wireless power transmission of 7.6 watts.
Motion Planning of a Spin-Rolling Sphere on a Plane
Nov 16, 2021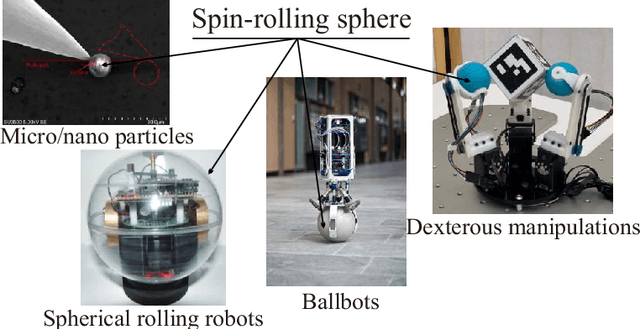
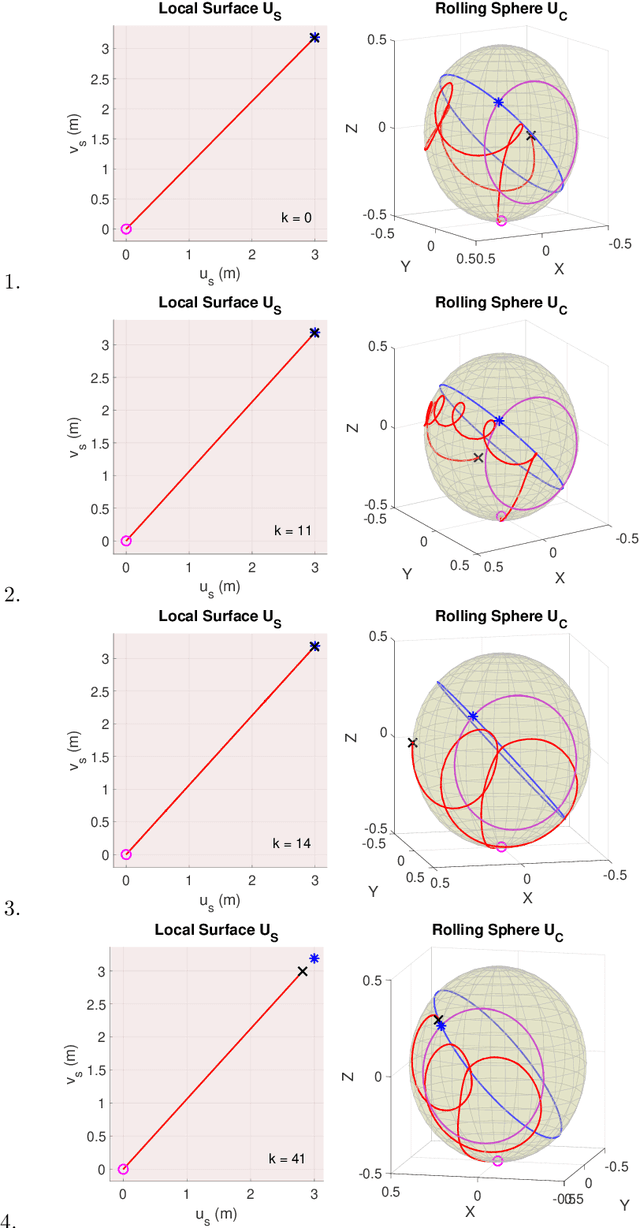
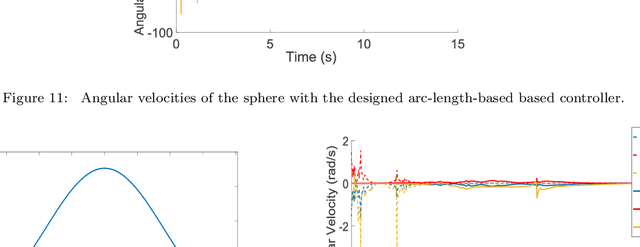
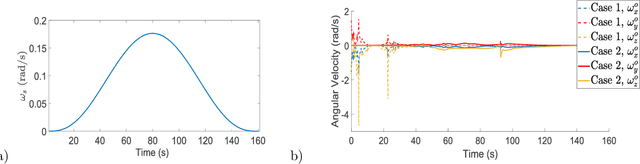
The paper deals with motion planning for a spin-rolling sphere when the sphere follows a straight path on a plane. Since the motion of the sphere is constrained by the straight line, the control of the sphere's spin motion is essential to converge to a desired configuration of the sphere. In this paper, we show a new geometric-based planning approach that is based on a full-state description of this nonlinear system. First, the problem statement of the motion planning is posed. Next, we develop a geometric controller implemented as a virtual surface by using the Darboux frame kinematics. This virtual surface generates arc-length-based inputs for controlling the trajectories of the sphere. Then, an iterative algorithm is designed to tune these inputs for the desired configurations. The feasibility of the proposed approach is verified by simulations.
Darboux-Frame-Based Parametrization for a Spin-Rolling Sphere on a Plane: A Nonlinear Transformation of Underactuated System to Fully-Actuated Model
Feb 16, 2021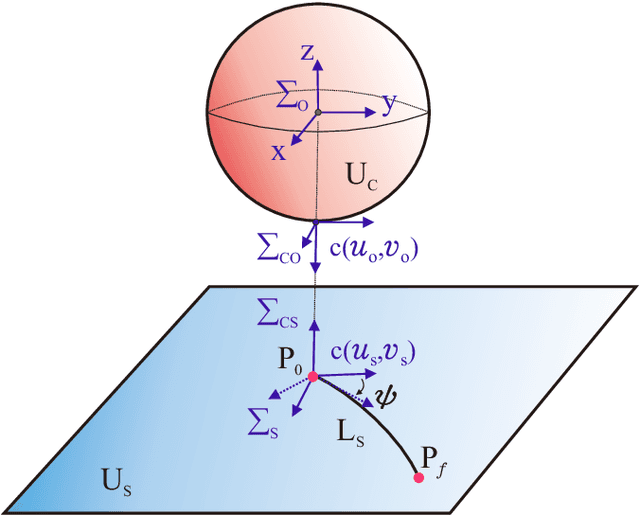
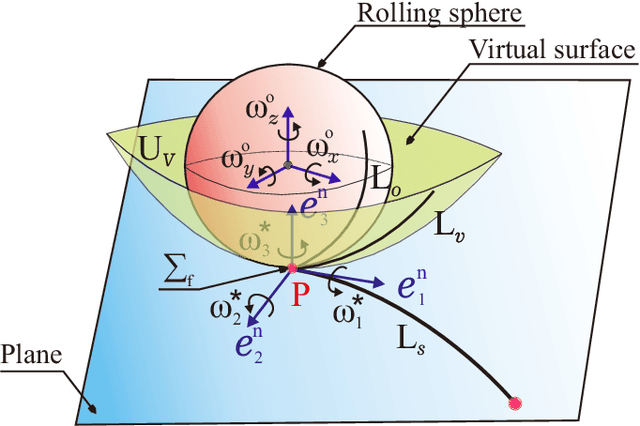
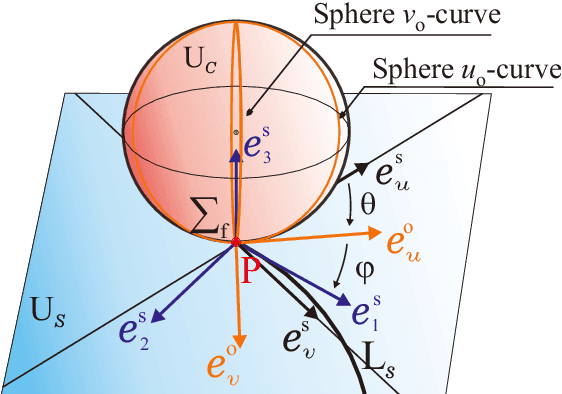
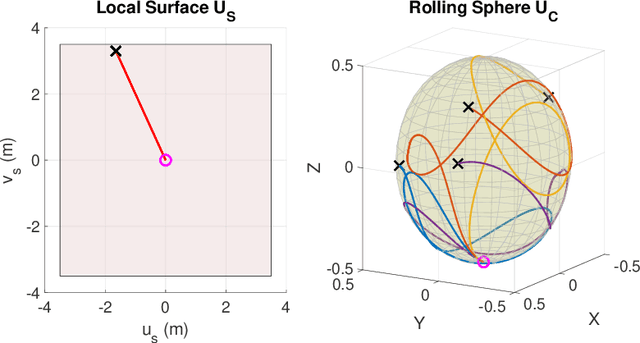
This paper presents a new kinematic model based on the Darboux-frame for motion control and planning. In this work, we show that an underactuated system as a spin-rolling sphere on a plane with three inputs and five states can be transformed into a fully-actuated model by the given Darboux-frame transformation. This nonlinear state transformation is a geometric model that is different from conventional state-space models. First, a kinematic model of the Darboux frame at the contact point of a rotating object i.e., the sphere, is established. Next, we propose a virtual surface that is trapped between sphere and plane surfaces. This virtual surface generates arc-length-based inputs for controlling the trajectories on the sphere and plane. Finally, we discuss the controllability of this new system after our introduced transformation. In the future, we will design a proper geometric path planning method for the obtained kinematic model.
Singularity-Free Inverse Dynamics for Underactuated Systems with a Rotating Mass
Feb 21, 2020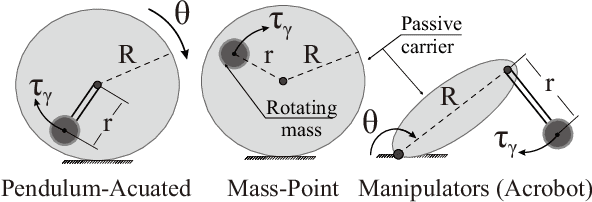
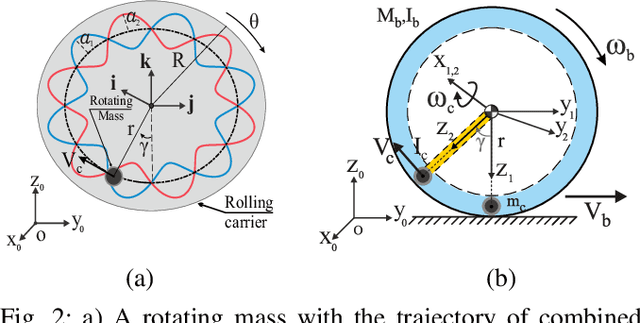
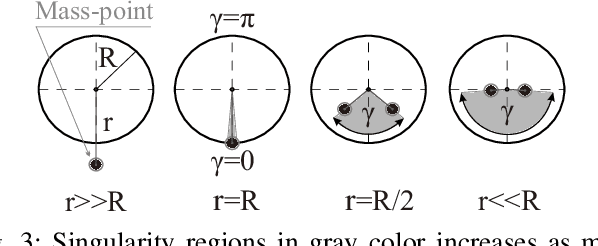

Motion control of underactuated systems through the inverse dynamics contains configuration singularities. These limitations in configuration space mainly stem from the inertial coupling that passive joints/bodies create. In this study, we present a model that is free from singularity while the trajectory of the rotating mass has a small-amplitude sine wave around its circle. First, we derive the modified non-linear dynamics for a rolling system. Also, the singularity regions for this underactuated system is demonstrated. Then, the wave parameters are designed under certain conditions to remove the coupling singularities. We obtain these conditions from the positive definiteness of the inertia matrix in the inverse dynamics. Finally, the simulation results are confirmed by using a prescribed Beta function on the specified states of the rolling carrier. Because our algebraic method is integrated into the non-linear dynamics, the proposed solution has a great potential to be extended to the Lagrangian mechanics with multiple degrees-of-freedom.