 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJoint-repositionable Inner-wireless Planar Snake Robot
Nov 21, 2024
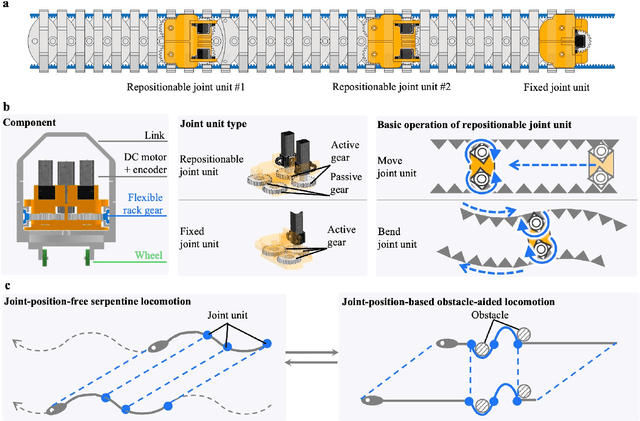
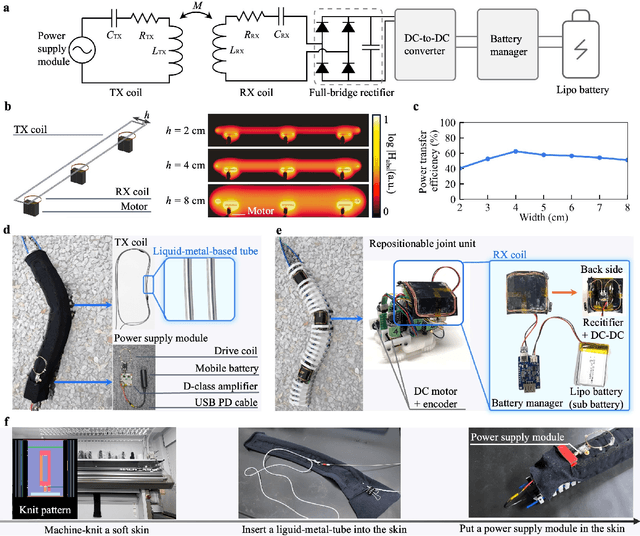
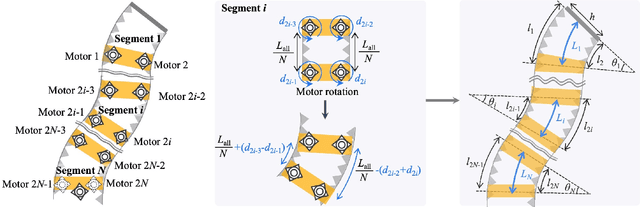
Bio-inspired multi-joint snake robots offer the advantages of terrain adaptability due to their limbless structure and high flexibility. However, a series of dozens of motor units in typical multiple-joint snake robots results in a heavy body structure and hundreds of watts of high power consumption. This paper presents a joint-repositionable, inner-wireless snake robot that enables multi-joint-like locomotion using a low-powered underactuated mechanism. The snake robot, consisting of a series of flexible passive links, can dynamically change its joint coupling configuration by repositioning motor-driven joint units along rack gears inside the robot. Additionally, a soft robot skin wirelessly powers the internal joint units, avoiding the risk of wire tangling and disconnection caused by the movable joint units. The combination of the joint-repositionable mechanism and the wireless-charging-enabled soft skin achieves a high degree of bending, along with a lightweight structure of 1.3 kg and energy-efficient wireless power transmission of 7.6 watts.
Estimation of posture and joint angle of human body using foot pressure distribution: Morphological computation with human foot
Jan 23, 2024This paper proposes a novel contact and wearable sensing system for estimating the upper body posture and joint angles (ankle, knee, and hip) of the human body using foot pressure distribution information obtained from a sensor attached to the plantar region. In the proposed estimation method, sensors are installed only on the plantar region, which is the end of the human body and the point of contact with the environment. The posture and joint angles of other parts of the body are estimated using only this information. As a contact and wearable sensor, the proposed system differs from previous measurement systems in the sense that the sensor does not need to be placed near the target joint or body. The estimation was carried out using a multivariate linear regression model with the foot pressure distribution as the input and the joint angle or posture as the output. The results reveal that it is possible to estimate the posture and joint angles of the human body from foot pressure distribution information (R2$\fallingdotseq$0.9). The proposed estimation method was validated by morphological computation to confirm that it is enabled by foot morphology. The validation approach compared the estimation accuracy achieved when an object was interposed between the foot pressure distribution sensor and the plantar region and the morphological relationship of the plantar region to the environment varied. The results reveal that there is a significant difference in the estimation accuracy between cases with and without an intervening object, suggesting that the morphology of the plantar region contributes to the estimation. Furthermore, the proposed estimation method is considered as physical reservoir computing, wherein the human foot is used as a computational resource.